





























137
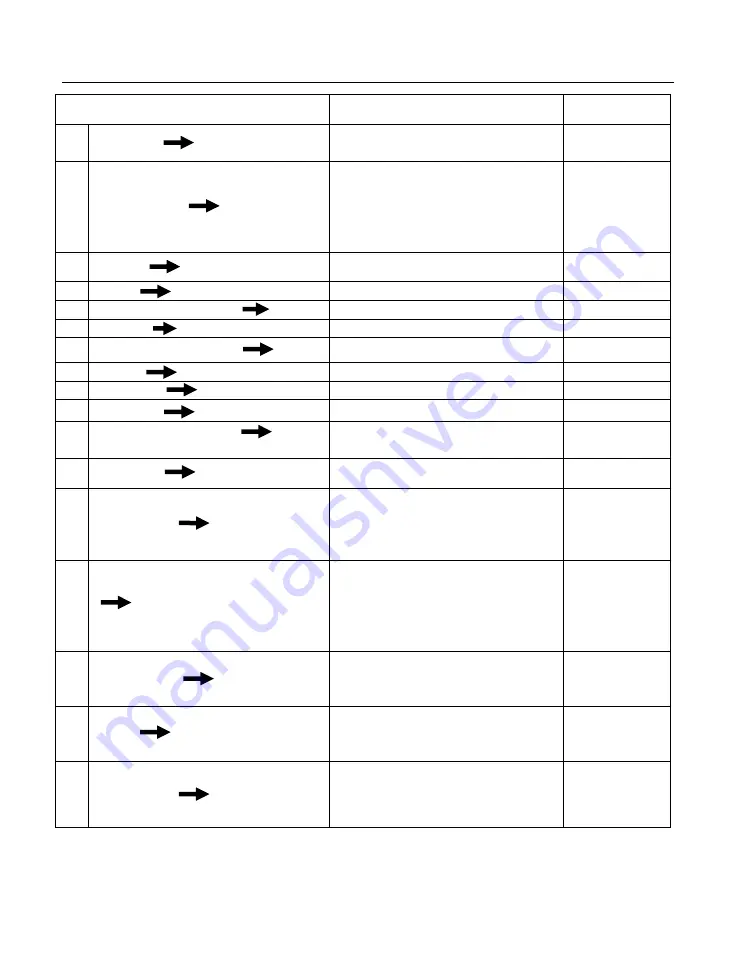
6041h
bit0
~
bit9
0
power on Initialization
Natural transition, control
command not required
0000h
1
Initialization No fault
Natural transition, control
command not required
If an error occurs during
initialization, the servo drive
directly goes to state 13
0270h
2
No fault Ready
0006h
0231h
3
Ready Wait for servo enabled
0007h
0233h
4
wait for servo enabled running
000Fh
0237h
5
running Wait for servo enabled
0007h
0233h
6
Wait for servo enabled Ready
0006h
0231h
7
Ready No fault
0000h
0250h
8
Running Ready
0006h
0231h
9
Running No fault
0000h
0270h
10
Wait for servo enabled No
fault
0000h
0270h
11 Running Fast to stop
0002h
0217h
12 Fast to stop No fault
Set 605Ah to a value among 0 to
3. Natural transition is performed
after stop, and no control
command is required.
0270h
13 Stop at fault
Once a fault occurs in any state
other than “fault”, the servo drive
automatically switchovers over to
the stop at fault state, without
control command.
021Fh
14 Stop at fault
Fault
Natural transition after stop at
fault, control command not
required.
0238h
15 Fault No fault
80h; Bit 7 is rising edge valid.
If Bit7=1, the other control words
are invalid.
0270h
16 Fast to stop Running
Set 605h to a value among 5 to 7.
After the stop process is
completed, 0Fh is sent after the
stop process is completed.
0237h







































































