





























CHAPTER 3 BASIC OPERATION
E5AK
3--16
·
AT (auto-tuning) cannot be executed while operation is canceled or dur-
ing ON/OFF control.
·
When you execute auto-tuning, the optimum PID parameters are auto-
matically set by forcibly changing the manipulated variable to calculate
the characteristics (called the “limit cycle method”) of the control target.
During auto-tuning, the AT LED flashes.
·
40%AT or 100%AT can be selected by the limit cycle of MV change width.
Specify [
] or [
], respectively, in the
“
AT execute/cancel” pa-
rameter (level 1 mode).
·
During heating and cooling control and with position-proportional
type, only 100%AT can be executed. (So, [
] (40%AT) will not be
displayed.)
·
To cancel AT execution, specify [
] (“AT cancel”).
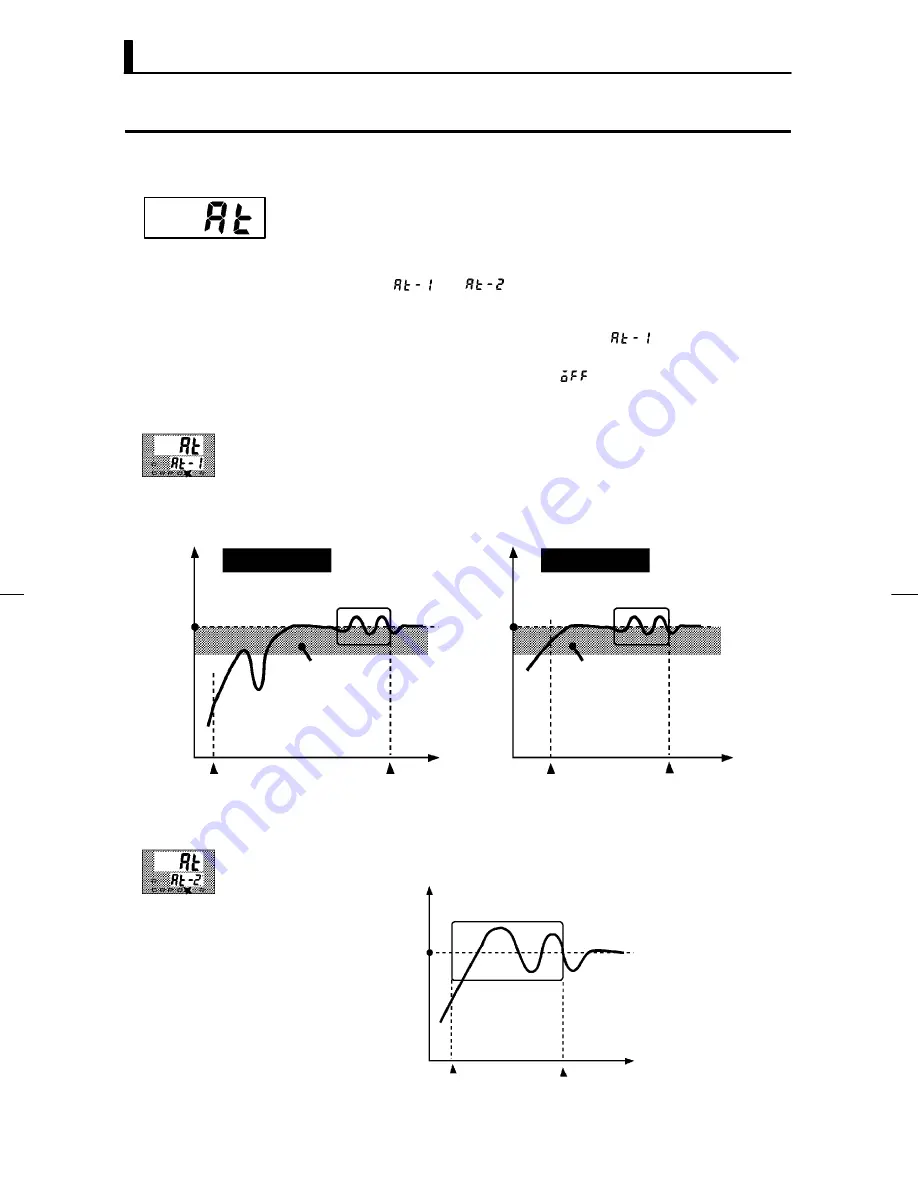
In order to set the limit cycle of MV change width to 40%, select 40%AT
to execute auto-tuning with fluctuations in the process value kept to a
minimum. However, note that auto-tuning takes longer to execute
compared with 100%AT.
The timing by which limit cycles are generated varies according to wheth-
er or not the deviation (DV) at the start of AT execution is 10% full-scale
or less.
Deviation at start of AT
execution
≧
10% full-scale
Deviation at start of AT
execution < 10% full-scale
Limit cycle of MV change
width 40%
Limit cycle of MV change
width 40%
Set point
Set point
Start of AT
execution
End of AT
Start of AT
execution
End of AT
Time
Time
Deviation 10%
full-scale
Deviation 10%
full-scale
In order to set the limit cycle of MV change width to 100%, select 100% AT
to shorten the AT execution time without worrying about fluctuations in
the process value.
Set point
Start of AT
execution
End of AT
Time
Limit cycle of MV
change width 100%
J
Auto-tuning
(A.T.)
F
40%AT
F
100%AT