



























55
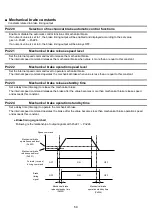
7 Signal during rotations
Signal will turn on when the motor is rotating, and it will turn off when the motor is stopped.
Signal will turn on when motor is rotated externally.
8 Signal during operations
The signal will turn on when the motor is energizing, and it will turn off when the energizing is stopped.
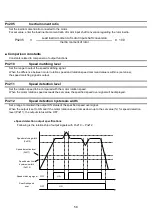
9 Speed matching signal
The signal will turn on when the motor rotation speed is matched with the speed command value.
10 Specified speed over
The signal will turn on when the motor rotation speed exceeds parameter set value.
* For more information, see the description of the speed detection-related parameters Pn210 to Pn212.
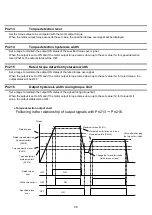
11 Rated torque over
The signal will turn on when the motor torque exceeds the rated torque.
12 Signal during torque limit
The signal will turn on when the motor torque reaches to the limit.
13 Specified torque over
The signal will turn on when the motor torque exceeds parameter set value.
* For more information, see the description of the speed detection-related parameters Pn213 to Pn216.
Pn125
C1 Output polarity selection
Pn126
C2 Output polarity selection
Pn127
C3 Output polarity selection
Pn128
C4 Output polarity selection
The polarity of the output terminal is set by setting the output polarity selection constant (Pn125
~
Pn128).
The status detected from the driver side is output when each constant set value changes as follows:
If 0: OFF (open) when the value is enabled
If 1: ON (close) when the value is enabled
If this constant is changed, the value does not change immediately after setting.
It changes to the set value by resupplying the power source of driver.
Set the ON/OFF polarity of each output terminal according to the specifications of the equipment that imports the
output signal.
Important
Operation
command
During
rotation
During
operation
Rotation speed Rotation command
Motor speed
External force







































































