





























Digitax HD M753 Control User Guide
95
Issue Number: 3
9 EtherCAT interface
9.1
Features
•
Standard RJ45 with support for shielded twisted pair, half-duplex /
full-duplex and 10 Mbs /100 Mbs connectivity
•
Dual 100 Mbps EtherCAT interfaces for use in line topologies i.e.
daisy chaining
•
Control loop synchronization
•
Control cycle times down to 250
μ
s
•
Configured Station Alias
•
CANopen over EtherCAT (CoE) which includes:
•
Support of CANopen CiA402
•
Cyclic sync position mode
•
Interpolated position mode
•
Velocity mode
•
Homing mode
•
One transmit and one receive PDOs via cyclic synchronous
communication
•
Additional one transmit and one receive PDOs via non-synchronised
cyclic communication
•
SDO access to all profile objects and drive parameters
•
Cyclic sync velocity mode
•
Cyclic sync torque mode
9.2
What is EtherCAT?
EtherCAT is an open high performance Ethernet-based fieldbus system
that overcomes the system limitations of other Ethernet solutions.
The Ethernet packet is no longer received, then interpreted and copied
as process data at every connection; instead the Ethernet frame is
processed on the fly.
The development goal of EtherCAT was to apply Ethernet to automation
applications that require short data update times (also called cycle
times) with low communication jitter (for synchronization purposes) and
low hardware costs. Typical application fields for EtherCAT are machine
controls (e.g. semiconductor tools, metal forming, packaging, injection
moulding, assembly systems, printing machines, robotics and many
others).
9.3
EtherCAT interface information
9.3.1
Bus media
The EtherCAT interface incorporates two 100 BASE-TX RJ45 ports.
9.3.2
Cabling considerations
To ensure long-term reliability it is recommended that any cables used to
connect a system together be tested using a suitable Ethernet cable
tester, this is of particular importance when cables are constructed on
site.
9.3.3
Cable
Cables should be shielded and as a minimum, meet TIA Cat 5e
requirements.
Cabling issues are the single biggest cause of network downtime.
Ensure cabling is correctly routed, wiring is correct, connectors are
correctly installed and any switches or routers used are rated for
industrial use. Office grade Ethernet equipment does not generally offer
the same degree of noise immunity as equipment intended for industrial
use.
9.3.4
Maximum network length
The main restriction imposed on Ethernet cabling is the length of a single
segment of cable.
The EtherCAT interface has two 100BASE-TX Ethernet ports, which
support segment lengths of up to 100 m. This means that the maximum
cable length which can be used between one EtherCAT port and another
100BASE-TX port is 100 m however it is not recommended that the full
100 m cable length is used. The total network length is not restricted by
the Ethernet standard but depends on the number of devices on the
network and the transmission media (copper, fiber optic, etc.).
The EtherCAT system designer must consider the impact that the
selected network structure will have on performance.
9.4
EtherCAT interface terminal
descriptions
The EtherCAT interface has two RJ45 Ethernet ports for the EtherCAT
network.
The
Digitax HD M753
has two RJ45 Ethernet ports for the EtherCAT
network, refer to Figure 9-1 Location of the communication connectors.
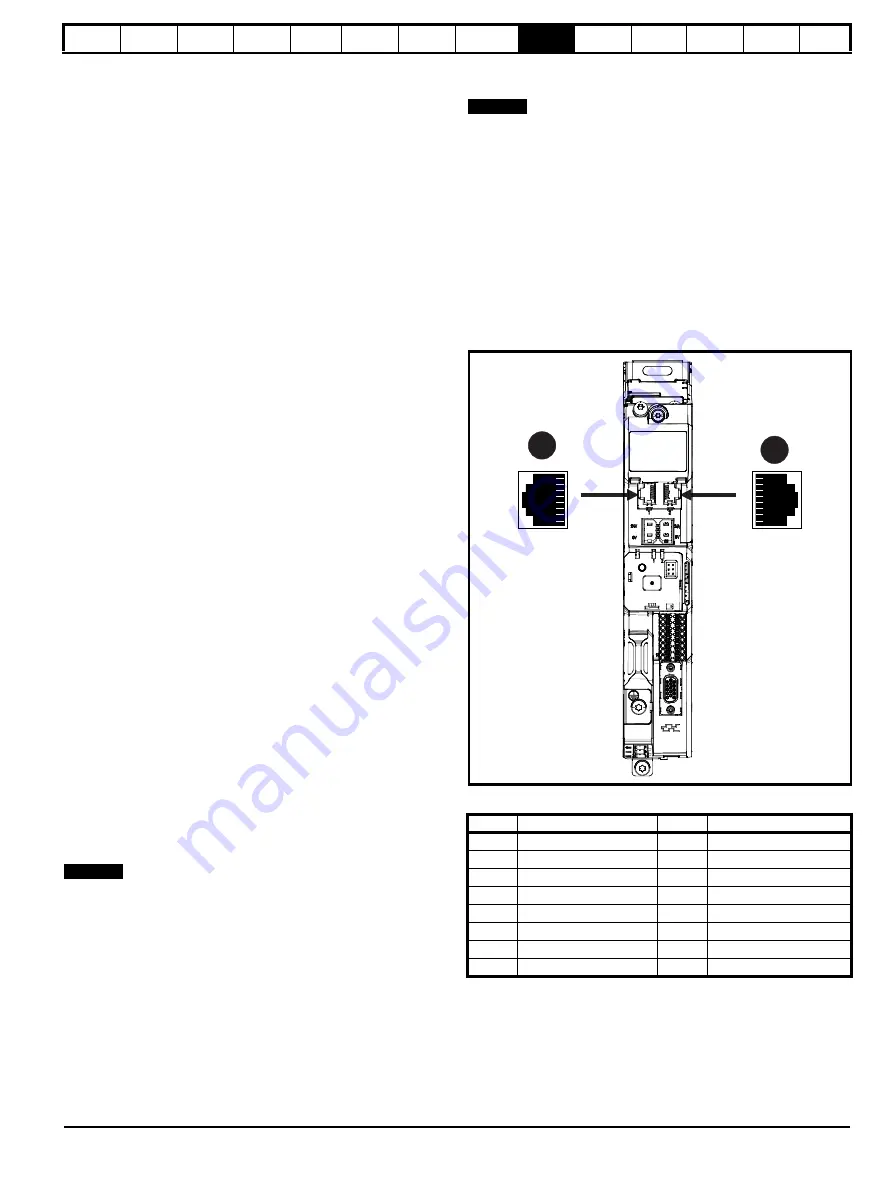
A
: EtherCAT port 1.
B
: EtherCAT port 2.
The shell of the RJ45 connector is capacitively coupled to ground.
Figure 9-1 Location of the communication connectors
Table 9-1 EtherCAT terminal descriptions
NOTE
Pin
EtherCAT port 1 - IN
Pin
EtherCAT port 2 - OUT
1
Tr
1
Tr
2
Transmit -
2
Transmit -
3
R
3
R
4
Not used
4
Not used
5
Not used
5
Not used
6
Receive -
6
Receive -
7
Not used
7
Not used
8
Not used
8
Not used
NOTE
1
1
8
8
A
B
Summary of Contents for Digitax HD M753 EtherCAT
Page 261: ......
Page 262: ...0478 0461 03...