





























112
Digitax HD M753 Control User Guide
Issue Number: 3
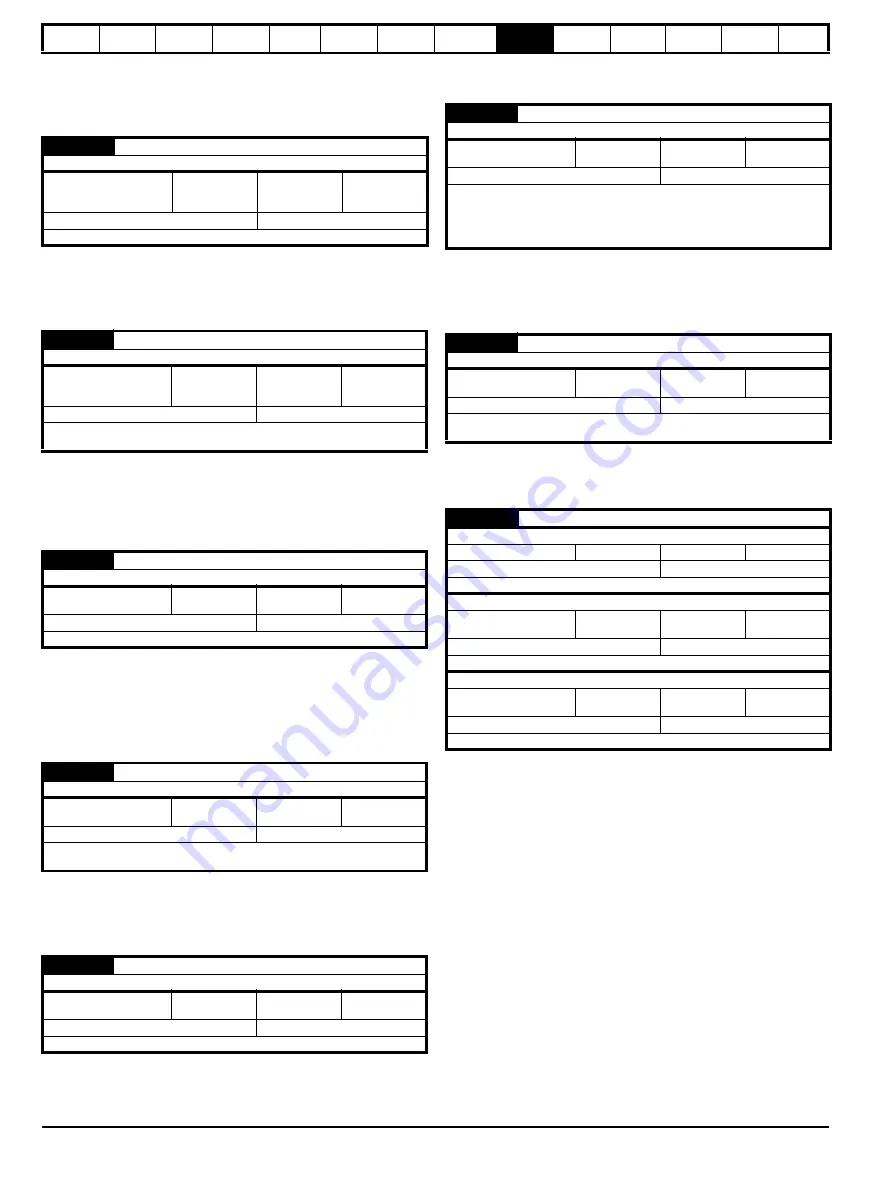
9.18.17 0x6062 Position_demand_value
This read only object is used to provide the currently demanded position
value. The value is given in user defined position units.
Table 9-64 Position_demand_value
9.18.18 0x6064 Position_actual_value
This read only object provides the actual value of the position feedback
device. The value is given in internal units.
Table 9-65 Position_actual_value
9.18.19 Following error window
This object can be used to indicate and configure the range of position
values, symmetrical to the position demand value, outside of which a
following error occurs. The value is given in user-defined position units.
Table 9-66 Following error window
9.18.20 Position window
This object can be used to indicate and configure the symmetrical range
of acceptable position values relative to the target position, within which
the target position will be regarded as having been reached. The value is
given in user-defined position units.
Table 9-67 Position window
9.18.21 Motor rated current
This object indicates the configured motor rated current. The value is
given in mA.
Table 9-68 Motor rated current
9.18.22 0x6080 Max motor speed
Table 9-69 Max motor speed
9.18.23 0x60F4 Following_error_actual_value
This read only object provides the actual value of the following error.
The value is given in userdefined position units.
Table 9-70 Following_error actual_value
9.18.24 0x60FB Position_control_parameter_set
object
Table 9-71 Position_control_parameter_set object
The AMC position controller (Advanced Motion Controller) kernel is used
by the basic internal position control, this object is only available when
the AMC is enabled.
The
position_demand_value
object contains the value supplied by either
the interpolated position mode or the profile position mode (in user
units). It is updated every control loop cycle. The values in the
position_control_parameter_set will be read in the background, so they
cannot be mapped cyclically (i.e. including them in PDOs is not allowed).
0x6062
Position_demand_value
Sub-index 0
Access: RO
Range:
0x80000000 to
0x7FFFFFFF
Size: 4 bytes
Unit: N/A
Default: N/A
Type:
DINT
Description:
Used to provide the currently demanded position value.
0x6064
Position_actual_value
Sub-index 0
Access: RO
Range:
0x80000000 to
0x7FFFFFFF
Size: 4 bytes
Unit: N/A
Default: N/A
Type:
DINT
Description:
This read only object provides the actual value of the position
feedback device. The value is given in internal units.
0x6065
Following error window
Sub-index 0
Access: RW
Range: Range: 0
to 0x7FFFFFFF
Size: 4 bytes
Unit: N/A
Default: 0x7FFFFFFF
Type:
UDINT
Description:
Permitted range of position values before a following error occurs.
0x6067
Position window
Sub-index 0
Access: RW
Range: 0 to
0x7FFFFFFF
Size: 4 bytes
Unit: N/A
Default: 0x7FFFFFFF
Type:
UDINT
Description:
Permitted range of position values for target position to be
regarded as reached.
0x6075
Motor rated current
Sub-index 0
Access: RW
Range: 0 to
0xFFFFFFFF
Size: 4 bytes
Unit: mA
Default: 0xFFFFFFFF
Type:
UDINT
Description:
Motor rated current value derived from Pr
05.007
.
0x6080
Max motor speed
Sub-index 0
Access: RW
Range: 0 to
40000
4 bytes
Unit: rpm
Default: N/A
Type:
UDINT
Description:
This object indicates the configured maximum allowed speed for
the motor in either direction. It is used to protect the motor and
changing the value of this object will also change Pr
1.006
.
The value is given in rotations per minute (rpm). Changing
Pr
1.006
will also automatically update the value in the objects.
0x60F4
Following_error actual_value
Sub-index 0
Access: RO
Range: 0 to
0xFFFFFFFF
Size: 4 bytes
Unit: N/A
Default: N/A
Type:
DINT
Description:
This read only object provides the actual value of the following
error.
0x60FB
Position_control_parameter_set
Sub-index 0
Access: RO
Range: N/A
Size: 1 byte
Unit: N/A
Default: 2
Type:
USINT
Description:
The number of control loop parameters.
Sub-index 1
Access: RW
Range: 0 to
500000
Size: 4 bytes
Unit: Depends
on Pr
39.007
Default: 2500
Type:
DINT
Description:
The position controller proportional gain.
Sub-index 2
Access: RW
Range: 0 to
2000
Size: 2 bytes
Unit: Depends
on Pr
39.010
Default:
1000 (i.e. a gain of 1)
Type: INT
Description:
The position controller speed feed forward gain.
Summary of Contents for Digitax HD M753 EtherCAT
Page 261: ......
Page 262: ...0478 0461 03...