





























S1 series standard inverter
-140-
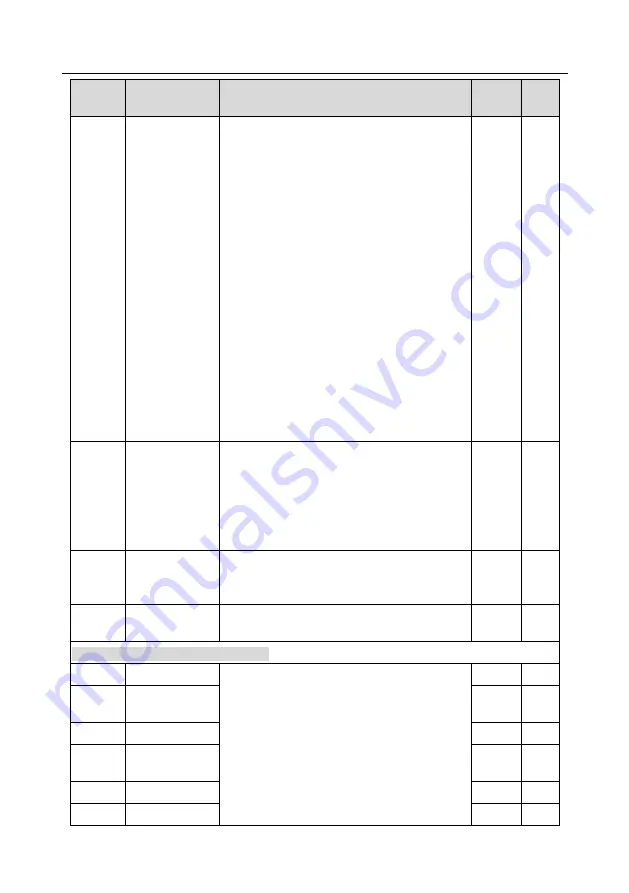
Function
code
Name
Detailed parameter description
Default
value
Modify
0: Continue integral control after the frequency
reaches upper/lower limit
1: Stop integral control after the frequency
reaches upper/lower limit
Tens:
0: The same with the main reference direction
1: Contrary to the main reference direction
Hundreds:
0: Limit based on the max. frequency
1: Limit based on A frequency
Thousands:
0: A+B frequency, acceleration /deceleration of
main reference A frequency source buffering is
invalid
1: A+B frequency, acceleration/ deceleration of
main reference A frequency source buffering is
valid,
acceleration
and
deceleration
are
determined by P08.04 (acceleration time 4).
P09.14
Low-frequency
proportional gain
(Kp)
0.00
–100.00
Low-frequency
switching
point:
5.00Hz,
high-frequency switching point: 10.00Hz (P09.04
corresponds to high-frequency parameter), and
the middle is the linear interpolation between
these two points
1.00
○
P09.15
Acceleration/
deceleration time
of PID command
0.0
–1000.0s
0.0s
○
P09.16
Filter time of PID
output
0.000
–10.000s
0.000s
○
P10 group Multi-step speed control
P10.02 Multi-step speed 0
Setting range of the frequency in 0
th
–15
th
sections are -100.0
–100.0%, 100% corresponds
to Max. output frequency P00.03.
Setting range of the running time in 0
th
–15
th
sections are 0.0
–6553.5s (min), the time unit is
determined by P10.37.
0.0%
○
P10.03
Running time of
0
th
step
0.0s(min)
○
P10.04 Multi-step speed 1
0.0%
○
P10.05
Running time of
1
st
step
0.0s(min)
○
P10.06 Multi-step speed 2
0.0%
○
P10.07
Running time of
0.0s(min)
○







































































