





























GX8 Manipulator 5. Motion Range
162
GX series Rev.2
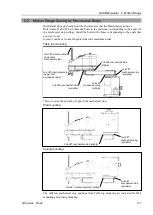
5.1 Motion Range Setting by Pulse Range (for All Joints)
Pulses are the basic unit of Manipulator motion. The motion range of the Manipulator is
controlled by the pulse range between the pulse lower limit and upper limit of each joint.
Pulse values are read from the encoder output of the servo motor.
For the maximum pulse range, refer to the following sections.
The pulse range must be set inside of the mechanical stop range.
5.1.1 Max. Pulse Range of Joint #1
5.1.2 Max. Pulse Range of Joint #2
5.1.3 Max. Pulse Range of Joint #3
5.1.4 Max. Pulse Range of Joint #4.
Once the Manipulator receives an operating command, it checks whether the target position
specified by the command is within the pulse range before operating. If the target position
is out of the set pulse range, an error occurs and the Manipulator does not move.
EPSON
RC+
The pulse range can be set on the [Range] panel shown by selecting [Tools]-[Robot
Manager]. (You may also execute the Range command from the [Command Window].)
5.1.1 Max. Pulse Range of Joint #1
The 0 (zero) pulse position of Joint #1 is the position where Arm #1 faces toward the positive
(+) direction on the X-coordinate axis.
When the 0 pulse is a starting point, the counterclockwise pulse value is defined as the
positive (+) and the clockwise pulse value is defined as the negative (
-
).
+Y
+X 0 pulse
+ B
- B
+ A
- A
Arm length
(mm)
Mounting specification
Table top
Ceiling
Wall
A
Max. motion
range
(deg.)
450
±
152
±
105
±
105
550
±
152
±
135
650
±
148
B
Max. pulse
range
(pulse)
450
- 1128676 to +4405476
- 273067 to +3549867
- 273067 to +3549867
550
- 1128676 to +4405476
- 819200 to +4096000
650
- 1055858 to +4332658
NOTE
Summary of Contents for SCARA GX Series
Page 1: ...Original instructions Rev 2 EM221R5129F SCARA Robots GX series Manual ...
Page 2: ...GX series Manual Rev 2 ...
Page 12: ......
Page 86: ...GX4 Manipulator 5 Motion Range 76 GX series Rev 2 ...
Page 88: ......
Page 188: ......
Page 202: ......
































































