




























GX8 Manipulator 4. Setting of End Effectors
146
GX series Rev.2
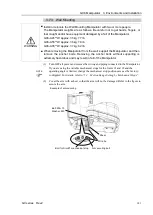
Brake release switch
- Joint #3 and Joint #4 cannot be moved up/down by
hand until the electromagnetic brake applied to the
joints have been released.
To move Joint #3 up/down or rotate Joint #4 while
attaching an end effector, turn ON the Controller
and press the brake release switch.
This button switch is a momentary-type: the brake
is released only while the button switch is being
pressed. The switch releases the brake of Joints #3
and #4 simultaneously.
Brake release switch
The shaft may be lowered
by the weight of an end
effector etc.
- Be careful of the shaft falling and rotating while the
brake release switch is being pressed because the
shaft may be lowered by the weight of an end
effector.
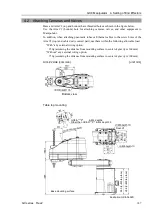
Layouts
- When you operate the manipulator with an end effector, the end effector may interfere
with the Manipulator because of the outer diameter of the end effector, the size of the
work piece, or the position of the arms. When designing your system layout, pay
attention to the interference area of the end effector.
Summary of Contents for SCARA GX Series
Page 1: ...Original instructions Rev 2 EM221R5129F SCARA Robots GX series Manual ...
Page 2: ...GX series Manual Rev 2 ...
Page 12: ......
Page 86: ...GX4 Manipulator 5 Motion Range 76 GX series Rev 2 ...
Page 88: ......
Page 188: ......
Page 202: ......





























































