





























GX8 Manipulator 5. Motion Range
176
GX series Rev.2
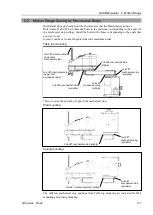
Ceiling mounting
GX8-A45**R
GX8-A55**R
GX8-A65**R
(
°
= degree)
A
Center of Joint #3
B
Motion range
C
Max. space
D
Base mounting surface
E
Range to mechanical stop
GX8-A45**R
GX8-A55**R
GX8-A65**R
S, E
C, P
S, E
C, P
S, E
C, P
a
Length of Arm #1 + #2 (mm)
450
550
650
b
Arm #1 length (mm)
200
300
400
c
Arm #2 length (mm)
250
d
Joint #1 motion (°)
105
152
e
Joint #2 motion (°)
125
147.5
145
147.5
f
(Motion range)
212.5
161.2
172.1
232
g
(Motion range of the back side)
292.5
515.4
603.2
h Angle to the Joint #1 mechanical stop(°)
0.9
1.4
i
Angle to the Joint #2 mechanical stop(°)
6.1
3.1
5.6
3.1
j
(Mechanical stop area)
191.7
147.7
219.7
k (Mechanical stop area of the back side)
295.7
518.2
607.7
x Motion prohibited area dimension (mm)
310
100
160
y Motion prohibited area dimension (mm)
-305
-250
-280
-250
280
GX8-A**2*R
GX8-A**3*R
S, E
C, P
S, E
C, P
m
Joint #3 motion range
200
170
330
300
n
Distance from the base mounting surface
394
427
394
427
p
Joint #3 mechanical stop area (upper limit)
4
2
4
2
q
Joint #3 mechanical stop area (lower limit)
16.6
13.6
11.6
8.6
Summary of Contents for SCARA GX Series
Page 1: ...Original instructions Rev 2 EM221R5129F SCARA Robots GX series Manual ...
Page 2: ...GX series Manual Rev 2 ...
Page 12: ......
Page 86: ...GX4 Manipulator 5 Motion Range 76 GX series Rev 2 ...
Page 88: ......
Page 188: ......
Page 202: ......






































































