

















GX4 Manipulator 2. Specifications
14
GX series Rev.2
2. Specifications
2.1 Model Number and Model Differences
GX4-A25 1 S
□
□
□
□
□
: Standard
Arm type
□
: Straight
-L : Left-curved
-R : Right-curved
Cable mounting direction
□
: Standard (Table top-Back, Multiple-Ceiling)
B : Downward (for Table top only)
Mounting specification
□
: Table top mounting
M : Multiple mounting
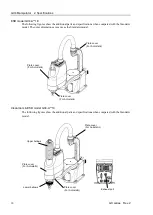
Environment specification
S : Standard (equivalent to IP20)
E : ESD (anti-static)
C : Cleanroom & ESD (anti-static)
Joint #3 stroke
1
: 150 mm (GX4-A**1S*, E*)
: 120 mm (GX4-A**1C*)
Arm length
25 : 250 mm
30 : 300 mm
35 : 350 mm
Environment Specification
ESD (anti-static) model: GX4-A**1E*
This model is Standard-model-based and uses resin materials with antistatic treatment.
This model controls adhesion of dust due to electrification.
Cleanroom & ESD (anti-static) model: GX4-A**1C*
This model has additional features that reduce dust emitted by the Manipulator to
enable use in clean room environments.
For details of the specifications, refer to “
Appendix A: Specifications
”.
Summary of Contents for SCARA GX Series
Page 1: ...Original instructions Rev 2 EM221R5129F SCARA Robots GX series Manual ...
Page 2: ...GX series Manual Rev 2 ...
Page 12: ......
Page 86: ...GX4 Manipulator 5 Motion Range 76 GX series Rev 2 ...
Page 88: ......
Page 188: ......
Page 202: ......





















































