





























GX8 Manipulator 5. Motion Range
164
GX series Rev.2
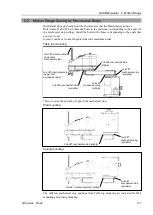
5.1.3 Max. Pulse Range of Joint #3
The 0 (zero) pulse position of Joint #3 is the position where the shaft is at its upper limit.
The pulse value is always negative because Joint #3 always moves lower than the 0 pulse
position.
Upper limit: 0 pulse
Joint #3 stroke
Environment specification
S, E
C
P
A
Max. motion range
(mm)
2
0 to -200
0 to -170
3
0 to -330
0 to -300
B
Max. pulse range
(pulse)
2
0 to -1092267
0 to -928427
3
0 to -1802240
0 to -1638400
For the Cleanroom & ESD model and Protected-model, the motion range set with the Joint
#3 mechanical stop cannot be changed.
5.1.4 Max. Pulse Range of Joint #4
The 0 (zero) pulse position of Joint #4 is the position where the flat near the end of the shaft
faces toward the end of Arm #2. (It is the same regardless of the Arm #2 direction.) With the
0 pulse as a starting point, the counterclockwise pulse value is defined as the positive (+)
and the clockwise pulse value is defined as the negative (
-
).
0 pulse
All models
A
Max. motion range (deg.)
±
360
B
Max. pulse range (pulse)
±
1668189
NOTE
Summary of Contents for SCARA GX Series
Page 1: ...Original instructions Rev 2 EM221R5129F SCARA Robots GX series Manual ...
Page 2: ...GX series Manual Rev 2 ...
Page 12: ......
Page 86: ...GX4 Manipulator 5 Motion Range 76 GX series Rev 2 ...
Page 88: ......
Page 188: ......
Page 202: ......





















































