





















Table of Contents
vi
GX series Rev.2
4.3.2 Inertia Setting ................................................................................ 56
4.4 Precautions for Auto Acceleration/Deceleration of Joint #3...................... 59
5. Motion Range
62
5.1 Motion Range Setting by Pulse Range (for All Joints) .............................. 62
5.1.1 Max. Pulse Range of Joint #1 ....................................................... 63
5.1.2 Max. Pulse Range of Joint #2 ....................................................... 64
5.1.3 Max. Pulse Range of Joint #3 ....................................................... 65
5.1.4 Max. Pulse Range of Joint #4 ....................................................... 65
5.2 Motion Range Setting by Mechanical Stops ............................................. 66
5.2.1 Setting the Mechanical Stops of Joints #1 and #2 ........................ 66
5.2.2 Setting the Mechanical Stop of Joint #3 ....................................... 70
5.3 Setting the Cartesian (Rectangular) Range in the XY Coordinate System
of the Manipulator .............................................................................................. 72
5.4 Standard Motion Range ............................................................................ 72
GX8 Manipulator
1. Safety
79
1.1 Conventions .............................................................................................. 79
1.2 Design and Installation Safety .................................................................. 80
1.3 Operation Safety ....................................................................................... 81
1.4 Emergency Stop ........................................................................................ 83
1.5 Safeguard .................................................................................................. 84
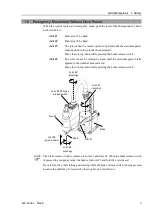
1.6 Emergency Movement Without Drive Power ............................................ 85
1.7 ACCELS Setting for CP Motions............................................................... 86
1.8 Warning Labels ......................................................................................... 87
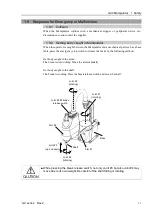
1.9 Response for Emergency or Malfunction ................................................. 90
1.9.1 Collision ......................................................................................... 90
1.9.2 Getting body caught in Manipulator .............................................. 90
2. Specifications
91
2.1 Model Number and Model Differences ..................................................... 91
2.2 Part Names and Outer Dimensions .......................................................... 94
2.2.1 Table Top Mounting ....................................................................... 94
2.2.2 Wall Mounting .............................................................................. 106
2.2.3 Ceiling Mounting ......................................................................... 112
2.3 Specifications .......................................................................................... 118
2.4 How to Set the Model .............................................................................. 118
3. Environments and Installation
119
3.1 Environmental Conditions ....................................................................... 119
3.2 Base Table ............................................................................................... 121
3.3 Mounting Dimensions ............................................................................. 124
3.4 From Unpacking to Installation ............................................................... 126
3.4.1 Precautions for the Flow from Unpacking to Installation ............ 126
Summary of Contents for SCARA GX Series
Page 1: ...Original instructions Rev 2 EM221R5129F SCARA Robots GX series Manual ...
Page 2: ...GX series Manual Rev 2 ...
Page 12: ......
Page 86: ...GX4 Manipulator 5 Motion Range 76 GX series Rev 2 ...
Page 88: ......
Page 188: ......
Page 202: ......







































































