





























3.1.2 CANopen over EtherCAT (CoE)
CANopen is a fieldbus system and device profile specification for embedded systems used in automation.
Among others CANopen defines communication models like master/slave, where the master sends or
requests data from the slaves. CANopen over EtherCAT (CoE) incorporates specialized profiles for motion
control and supports a standardized set of commands to be used for motion control. This set of commands is
known as CiA 402 and is defined in the IEC standard IEC 61800-7-201:2015 for adjustable speed electrical
power drive systems.
If you are using TwinCAT as your controller, you will need to import the SOMANET CiA 402 ESI (EtherCAT
Slave Information) XML file to your project.
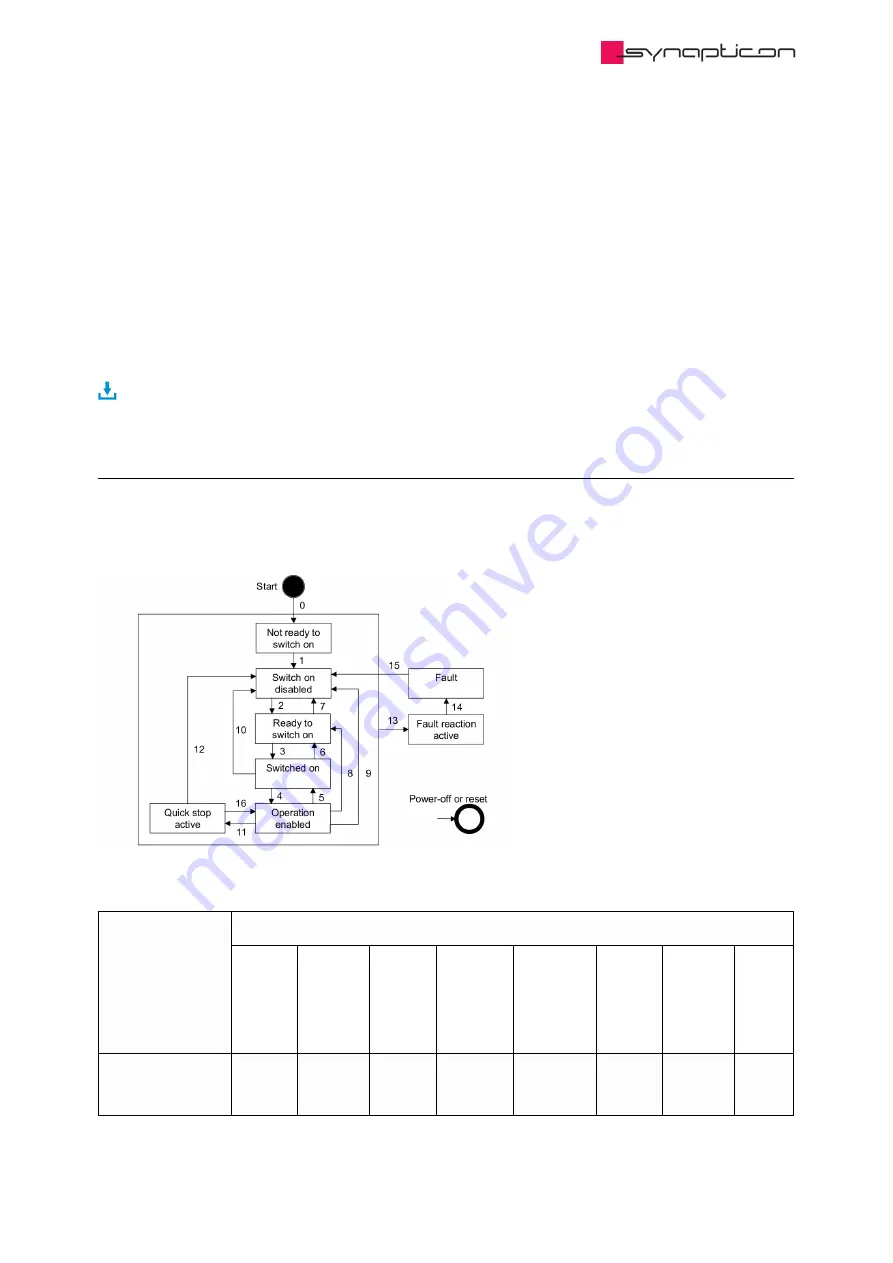
3.1.2.1 Drive State Machine (CiA 402)
Each CiA 402 device is controlled by the State Machine.
This diagram depicts the transitions of the system’s states according to IEC 61800-7-201
The function that are available in each state are given in the table below:
Function
FSA States
Not
ready
to
switch
on
Switch
on
disabled
Ready
to
switch
on
Switched
on
Operation
enabled
Quick
Stop
active
Fault
reaction
active
Fault
Brake applied, if
present
Yes
Yes
Yes
Yes
No
No
No
Yes
Synapticon Documentation
© 2021 Synapticon GmbH | Daimlerstraße 26 | D-71101 Schönaich Documentation v 4.19.0 | Built 2022-02-01
525/1031





















































