






















1 - 8
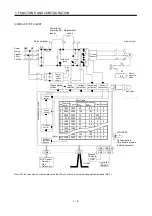
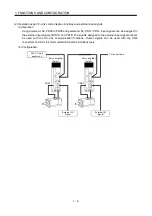
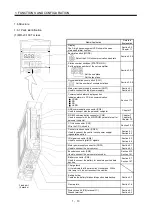
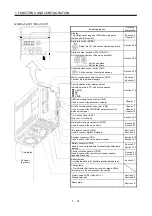
1. FUNCTIONS AND CONFIGURATION
Servo Amplifier
MR-J3-
Item
10T 20T 40T 60T 70T 100T 200T 350T 500T 700T 11KT 15KT 22KT 10T1 20T1 40T1
Dog type
Home position return is made starting with Z-phase pulse after passage of proximity dog.
Home position address may be set. Home position shift distance may be set. Home position return
direction may be selected.
Automatic at-dog home position return return/automatic stroke return function
Count type
Home position return is made by counting encoder pulses after contact with proximity dog.
Home position address may be set. Home position shift value may be set. Home position return
direction may be set.
Automatic at-dog home position return return/automatic stroke return function
Data setting type
Home position return is made without dog.
Home position may be set at any position by manual operation, etc. Home position address may be
set.
Stopper type
Home position return is made by pressing machine part against stroke end.
Home position address may be set. Home position return direction may be set.
Home position
ignorance
(Servo-on
position as
home position)
Position where servo-on (RYn0) is switched on is defined as home position.
Home position address may be set.
Dog type rear
end reference
Home position return is made with respect to the rear end of a proximity dog.
Home position address may be set. Home position shift value may be set. Home position return
direction may be set.
Automatic at-dog home position return return/automatic stroke return function
Count type front
end reference
Home position return is made with respect to the front end of a proximity dog.
Home position address may be set. Home position shift value may be set. Home position return
direction may be set.
Automatic at-dog home position return return/automatic stroke return function
Dog cradle type
Home position return is made with respect to the front end of a proximity dog by the first Z-phase
pulse.
Home position address may be set. Home position shift value may be set. Home position return
direction may be set.
Automatic at-dog home position return return/automatic stroke return function
Dog type last Z-
phase reference
Home position return is made with respect to the front end of a proximity dog by the last Z-phase
pulse.
Home position address may be set. Home position shift value may be set. Home position return
direction may be set.
Automatic at-dog home position return return/automatic stroke return function
Dog type front
end reference
Home position return is made to the dog front end with respect to the front end of a proximity dog.
Home position address may be set. Home position shift value may be set. Home position return
direction may be set.
Automatic at-dog home position return return/automatic stroke return function.
Home
position
return mode
Dogless Z-
phase reference
Home position return is made with respect to the first Z phase to the Z phase.
Home position address may be set. Home position shift value may be set. Home position return
direction may be set.
Operat
ion m
ode
Automatic positioning to home
position
High-speed automatic return to a defined home position.
Other functions
Absolute position detection, backlash function
Overtravel prevention using external limit switch
Software stroke limit
Structure
Self-cooled, open
(IP00)
Force-cooling, open (IP00)
Self-cooled, open
(IP00)
Содержание MELSERVO MR-J3-xT
Страница 22: ...8 MEMO ...
Страница 156: ...4 46 4 SIGNALS AND WIRING MEMO ...
Страница 276: ...7 26 7 MR Configurator MEMO ...
Страница 324: ...10 16 10 SPECIAL ADJUSTMENT FUNCTIONS MEMO ...
Страница 418: ...14 66 14 OPTIONS AND AUXILIARY EQUIPMENT MEMO ...







































































