





























Lite-On Technology Corp.
Industrial Automation
156
Chapter 7
Control Function
7.1.
Selection of operating mode
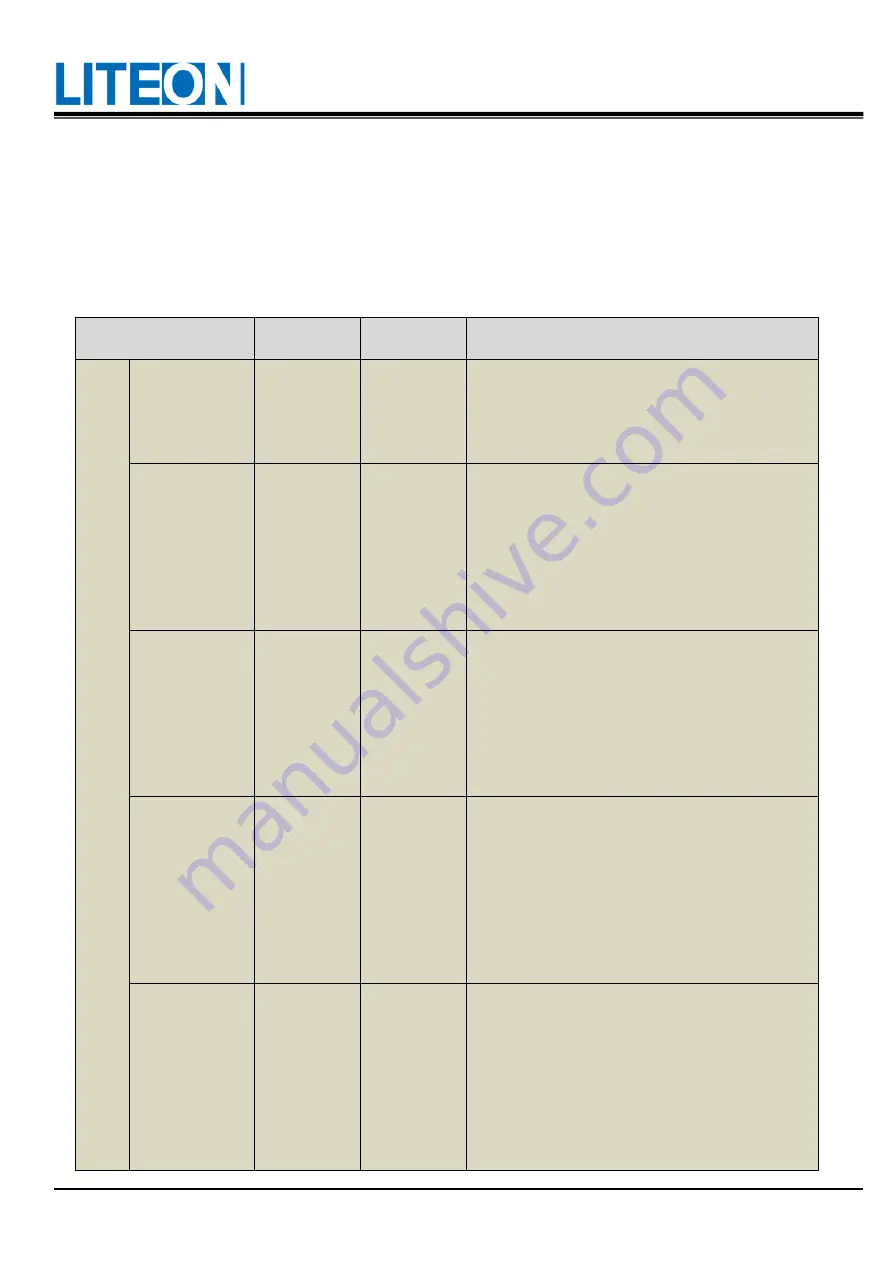
ISA drive provides three basic operating modes, position, speed and torque modes. You can use a
single control mode or the mixed mode for control. The following table lists all the operating modes
and relevant description:
Mode name
Mode
code
Mode
number
Description
S
ingl
e mode
Position
mode
(Terminal
input)
P
00
The drive receives the position command
and controls the motor to move to the
target position.
The position command is input from the
terminal block. The signal type is pulse.
Speed
mode
S
01
The drive receives the speed command
and controls the motor to reach the target
rotational speed.
The internal register provides the speed
command (three registers available) or the
external terminal block inputs the analog
voltage (-10V ~ +10V). The command
selection is based on the DI signal.
Torque
mode
T
02
The drive receives the torque command
and controls the motor to reach the target
torque.
The internal register provides the torque
command (three registers available) or the
external terminal block inputs the analog
voltage (-10V ~ +10V). The command
selection is based on the DI signal.
Speed
mode
(no analog
input)
Sn
08
The drive receives the speed command
and controls the motor to reach the target
rotational speed.
The speed command can only be
provided by the internal register (three
registers available). It cannot be provided
by the external terminal block. The
command selection is based on the DI
signal.
Torque
mode
(no analog
input)
Tn
09
The drive receives the torque command
and controls the motor to reach the target
torque.
The torque command can only be
provided by the internal register (three
registers available). It cannot be provided
by the external terminal block. The
command selection is based on the DI
signal.







































































