





























User Manual
Chapter 1
GFK-1742F
Jan 2020
Product Overview
7
DSM314 Position Strobes
Each axis connector on the DSM314 faceplate has two Position Strobe inputs. A rising edge
pulse on a Strobe input causes the axis Actual Position to be captured. The position capture
resolution is +/- 2 counts with an additional 10 microseconds of variance for the strobe input
filter delay. The actual error seen is dependent upon servo acceleration and strobe input
filtering/sampling. Consult Appendix G for the exact formulas used to calculate strobe
accuracy.
The strobe data is updated within one position loop update interval (0.5 - 2 ms) in the
associated Strobe Position %AI data register. The Strobe Position data is also stored in a DSM
Parameter Register that can be used as an operand for Motion Program PMOVE and CMOVE
commands and in Local Logic. The Strobe Position data update to the host controller is
dependent on the host controller sweep time and may take longer than 2 ms.
In Digital mode, these strobes are 5V single-ended/differential inputs (IN1-IN2).
In Analog mode, these strobes are only 5V single-ended (IO5-IO6). In Analog mode only,
these strobe inputs are pulled high (as seen in the host controller %I Strobe status bits) if not
physically connected to a device.
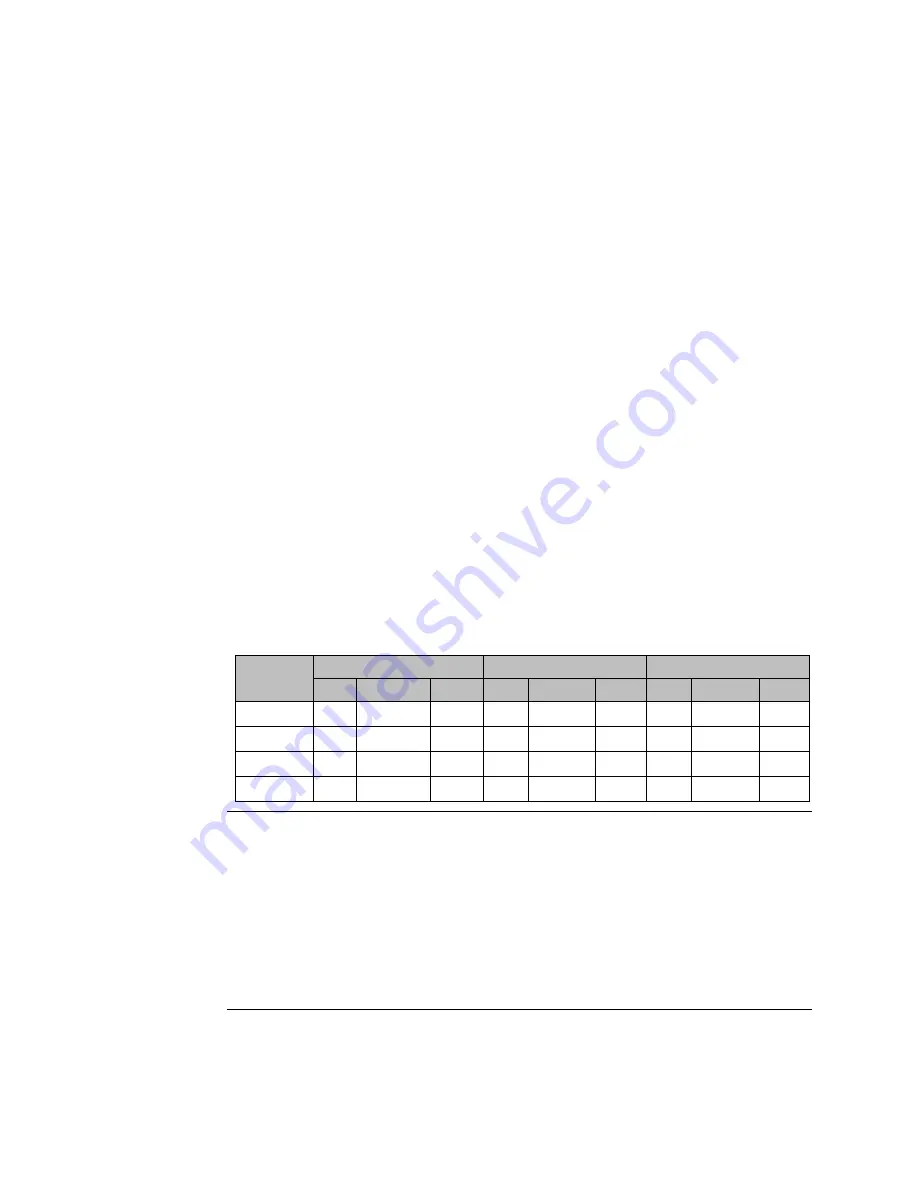
DSM314 Scan Time Contribution
The tables below list the time that the DSM314 adds to host controller scan time. The scan
time contribution is related to (1) the number of DSM314 axes configured, and (2) the type
of rack (main, expansion, or remote) the DSM314 is mounted in.
DSM314 Scan Time Contribution (in Milliseconds)
No. of Axes
Configured
90-30 CPU364 Rack
90-30CPU374 Rack
RX3i CPU310 Rack
Main Expansion
Remote Main
Expansion Remote Main
Expansion Remote
1
1.9
2.9
7.9
1.3
2.3
6.9
1.8
2.3
6.9
2
2.5
3.8
11.0
1.9
3.1
10.0
2.5
3.2
10.0
3
3.1
4.7
14.2
2.4
3.9
13.0
3.1
4.2
13.1
4
3.6
5.6
17.3
2.9
4.8
16.0
3.8
5.1
16.2
Note:
1.
Be aware that the DSM314’s internal Local Logic engine has a
maximum scan time of 2ms that is
independent of the host controller scan. This allows the user the flexibility to control time critical
motion tasks within the Local Logic program. See the applicable chapters in this manual for details
on Local Logic programming.
2.
(90-30 Feature only) For applications where the above additions to scan rates will affect machine
opera
tion, you may need to use the “suspend I/O,” “DOIO,” and “SNAP” features to transfer
necessary data to and from the DSM314 selectively. These features let you avoid transferring all
the %I, %Q, %AI, %AQ data every scan, if you do not require it that frequently, which reduces the
scan time contribution amount.