





























User Manual
Chapter 1
GFK-1742F
Jan 2020
Product Overview
4
1.2
Section 1: Motion System Overview
The DSM314 is an intelligent, fully programmable, motion control option module for the
Series 90-30 and PACSystems RX3i control systems. The DSM314 allows a user to combine
high performance motion control and Local Logic capabilities with logic solving functions in
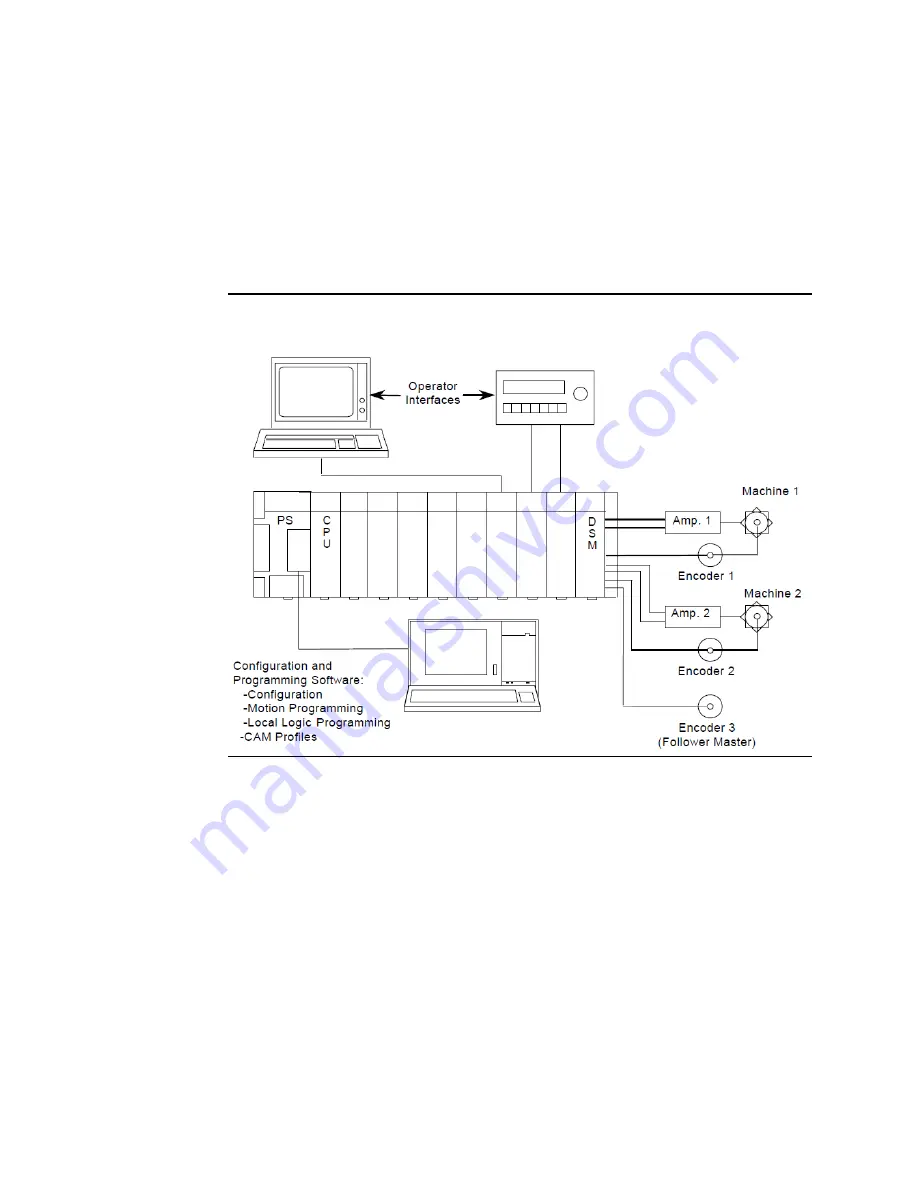
one integrated system. The figure below illustrates the hardware and software used to set
up and operate a servo system. This section briefly discusses each system element to
provide an overall understanding of system operation.
Figure 2: Hardware and Software Used to Configure, Program, and Operate a
DSM314 Servo System
1.2.1
DSM314 Operation with a Host Controller
The DSM314 and host controller (either PACSystems RX3i or Series 90-30 PLC) operate
together as one integrated motion control package. The DSM314 communicates with the
host controller through the backplane interface. Every host controller sweep, data such as
Commanded Velocity and Actual Position within the DSM314 is transferred to the host
controller in %I and %AI data. Also, every host controller sweep, %Q and %AQ data is
transferred from the host controller to the DSM314. The %Q and %AQ data is used to control
the DSM314. %Q bits perform functions such as initiating motion, aborting motion, and
clearing strobe flags. %AQ commands perform functions such as initializing position and
loading parameter registers.
Besides the use of %I, %AI, %Q, and %AQ addresses, an additional way to send parameters
from the host controller to the DSM314 is with the COMM_REQ ladder program instruction.
Details about using the COMM_REQ instruction with the DSM can be found in Appendix B,
DSM314 COMM_REQ Instructions