





























User Manual
Chapter 5
GFK-1742F
Jan 2020
DSM314 to Host Controller Interface
162
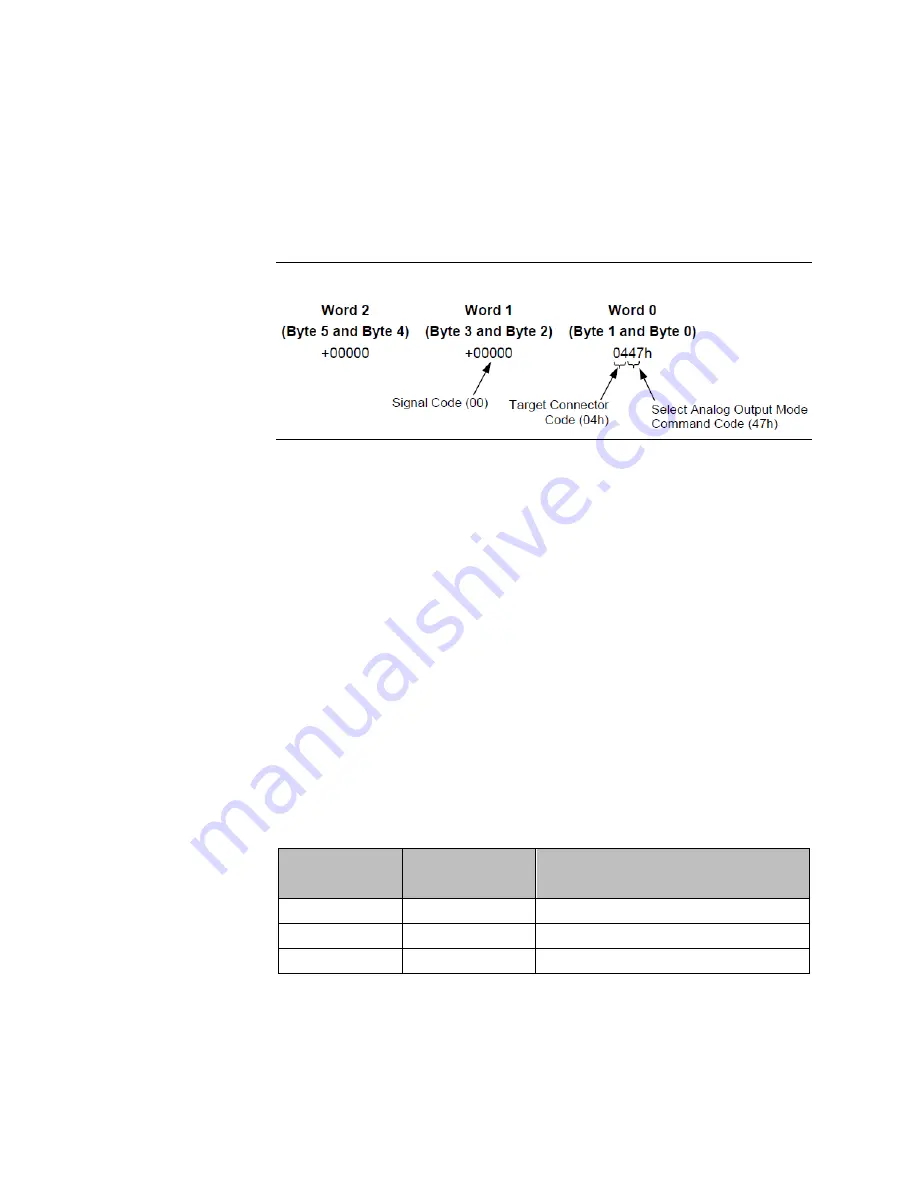
Example 3:
In Example 2, the %AQ Force Analog Output default signal was replaced as the
Analog Output on Connector D by the Servo Axis 1 Torque Command signal. To
restore the %AQ Force Analog Output signal (Signal Code=00) to Connector D
(Connector Code=04h), place the following data in the %AQ immediate command
words:
Figure 66
4.27 Clear New Configuration Received. This command clears the New Configuration
Received %I bit. Once cleared, the Configuration Complete bit is only set when the
host controller resets or reconfigures the module. The host controller can monitor
the bit to determine if it must re-send other %AQ commands, such as In Position
Zone or Jog Acceleration. This would only be necessary if the %AQ commands were
used to override DSM314 configuration data programmed with the host controller
configuration software. This command can be sent from the Command registers for
any axis (1-4).
4.28 Load Parameter Immediate. This command is executed from the host controller to
immediately change a DSM314 data parameter value. It can be sent from the
Command registers for any axis (1-4). Data parameters are only used by motion
programs. Each parameter change requires a command. Byte 1 of Word 0 contains
the Parameter Number (in hexadecimal format) to be changed. The DSM314
contains 256 double word parameters, numbered 0-255 (decimal). For details, see
“Parameters (P0
-
P255) in the DSM314”
in chapter 7.
Table 48: Number of Load Parameter Immediate Commands Permitted per
Sweep
Number of Axes
Configured
Number of %AQ
Words
Number of Load Parameter Immediate
Commands Permitted per Sweep
2
6
2
3
9
3
4
12
4