





























Configuration Mode (ConF)
263
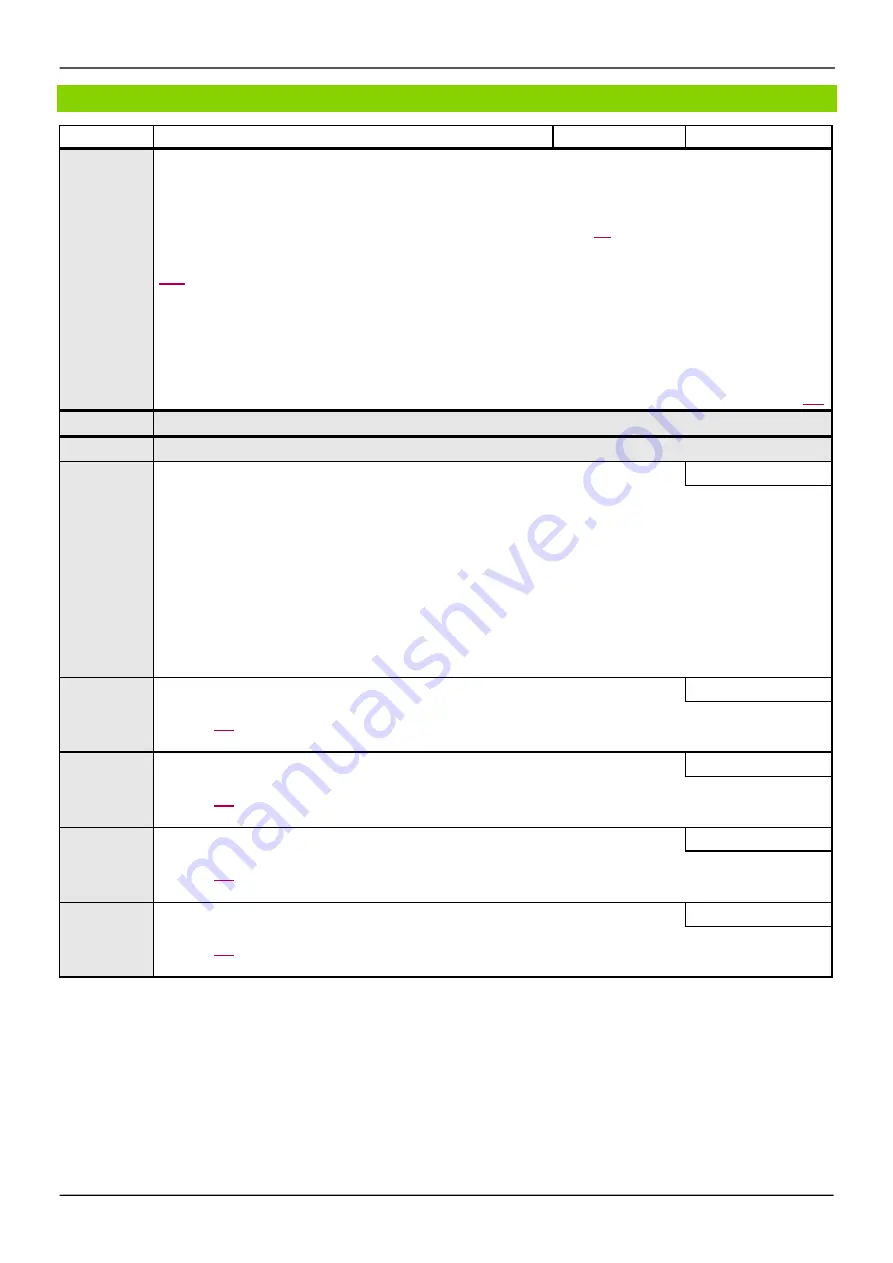
Code
Nam e / De s cription
Adjus tment range
Factory s e tting
nO
YES
Stt
LFF
rLS
rMP
FSt
dCI
Behavior of the drive in the event of a communication interruption w ith integrated Modbus.
[Ignore]
(nO)
: Detected fault ignored
[Fre e w heel]
(YES)
: Freew heel stop
[Per STT]
(Stt)
: Stop according to configuration of
[Type of stop]
(Stt)
page
173
, without fault tripping. In this case, the
fault relay does not open and the drive is ready to restart as soon as the detected fault disappears, according to the restart
conditions of the active command channel (for example, according to
[2/3 wire control]
(tCC)
and
[2 wire type]
(tCt)
page
125
if control is via the terminals). Configuring an alarm for this detected fault is recommended (assigned to a logic output, for
example) in order to indicate the cause of the stop.
[fallback s pd]
(LFF)
: Change to fallback speed, maintained as long as the detected fault persists and the run command has
not been removed (1)
[Spd m aint.]
(rLS)
: The drive maintains the speed being applied w hen the detected fault occurred, as long as the detected
fault is present and the run command has not been removed (1)
[Ram p s top]
(rMP)
: Stop on ramp
[Fas t s top]
(FSt)
: Fast stop
[DC inje ction]
(dCI)
: DC injection stop. This type of stop cannot be used w ith certain other functions. See table on page
165
.
FLt-
[FAULT MANAGEMENT]
(continued)
Sdd-
[ENCODER FAULT]
Sdd
nO
YES
[Load slip detection]
[Ye s ]
(YES)
Load slip detection activation
[No]
(nO)
: Detected fault ignored
[Ye s ]
(YES)
: Freew heel stop
The event is triggered by comparison w ith the output frequency and the speed feedback according to the related parameters
configuration
FAnF
,
LAnF
,
dANF
and
tAnF
.
The event is also triggered as soon as a RUN order is received, if the sign of the output frequency and the speed feedback are
in opposite w ay during
tAnF
.
In case of a detected fault, the drive sw itch to a freewheel stop, and if the brake logic control function has been configured, the
brake command w ill be set to 0.
FAnF
*
[ANF Frequency Thd.]
-
Visible if
[Encoder usage]
(EnU)
is set to
[Fdbk monit.]
(SEC)
.
See page
136
LAnF
*
[ANF Detection level]
-
Visible if
[Encoder usage]
(EnU)
is set to
[Fdbk monit.]
(SEC)
.
See page
136
dAnF
*
[ANF Direction check]
-
Visible if
[Encoder usage]
(EnU)
is set to
[Fdbk monit.]
(SEC)
.
See page
137
tAnF
*
[ANF Time Thd.]
-
Visible if
[Encoder usage]
(EnU)
is set to
[Fdbk monit.]
(SEC)
.
See page
137
Parameters described in this page can be accessed by:
DRI- > CONF > FULL > FLT- > CLL-/SDD-
Содержание ER24 Series
Страница 1: ...BLEMO ER24 Variable Speed Drives for Asynchronous and Synchronous Motors Programming Manual 05 2018 ...
Страница 6: ...6 Table of Contents ...
Страница 14: ...16 ...
Страница 34: ...Overview 36 ...
Страница 40: ...42 ...
Страница 74: ...Monitoring Mode MOn 76 ...
Страница 241: ......
Страница 278: ...Configuration Mode ConF 278 Access Level See Access Level LAC page 280 ...
Страница 294: ...Interface ItF 294 ...
Страница 298: ...298 Open Save as trA ...
Страница 302: ...Multipoint Screen 302 ...
Страница 304: ...304 ...
Страница 306: ...Maintenance 306 ...
Страница 316: ...Diagnostics and Troubleshooting 316 ...
Страница 318: ...318 ...
Страница 340: ...Index of Parameter Codes 340 ...
Страница 343: ......
Страница 344: ...Index of Parameter Codes 342 ER24_Programming_Manual_EN_01 2017 ...





















































