





























Chapter 6 ,P9 Failure and protection
99
if the running frequency is greater than P8-25, the acceleration time 1 is selected.
During deceleration, if the running frequency is greater than P8-26, the deceleration time 1 is
selected. If the running frequency is less than P8-26, the deceleration time 2 is selected.
P8-27
Terminal jog priority
0
:
Invalid 1: Valid
Default
:
0
This parameter is used to set whether the terminal jog function has the highest priority.
When the terminal jog priority is valid, if the terminal jog command appears during
operation, the inverter switches to the terminal jog operation state.
P8-28
Frequency detection value
FDT2
0.00Hz
~
Maximum frequency
Default
:
0.00Hz
P8-29
Frequency detection
hysteresis value (FDT2)
0.0%
~
100.0%
(
FDT2 level
)
Default
:
5.0%
This frequency detection function is identical to the function of FDT1. Please
refer to the description of function codes P8-19 and P8-20.
P8-30
Arbitraryarrival frequency
detectionvalue1
0.00Hz
~
Maximum frequency
Default
:
50.00Hz
P8-31
Arbitrary arrival frequency
detection width 1
0.0%
~
100.0%
(
Maximum
frequency
)
Default
:
0.0%
P8-32
Arbitrary arrival frequency
detection value 2
0.00Hz
~
Maximum frequency
Default
:
50.00Hz
P8-33
Arbitrary arrival frequency
detection width 2
0.0%
~
100.0%
(
Maximum
frequency
)
Default
:
0.0%
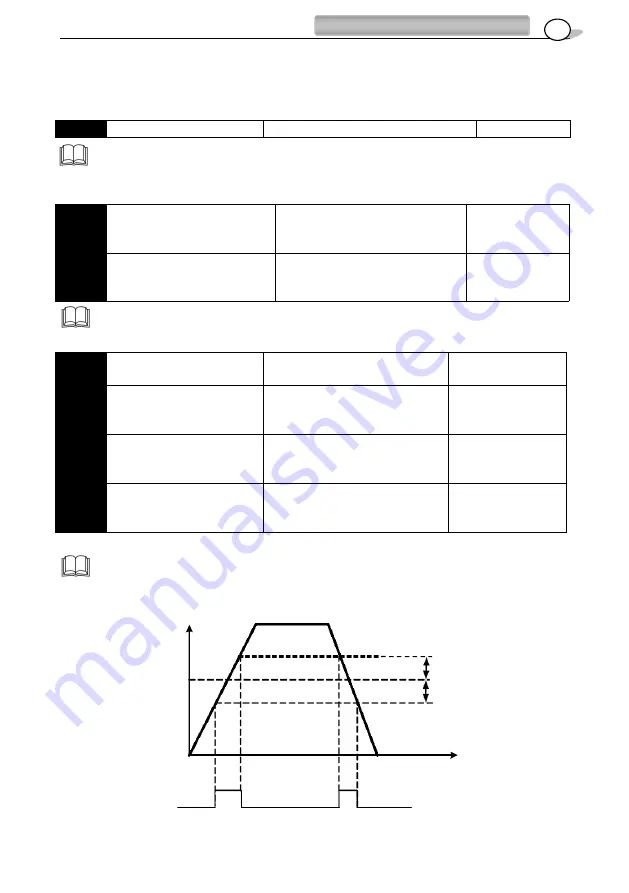
When the output frequency of the inverter is within the positive and negative detection
range of any arrival frequency detection value, the ON signal is output. Figure 6-20 shows
a schematic of this function.
OFF
ON
ON
Frequency
detection width
Arbitrary arrival frequency
Running frequency
OFF
OFF
time
Figure 6-20 Schematic diagram of arbitrary arrival frequency detection







































































