


























- 120 -
UMC22-FBP
Universal Motor Controller UMC22-FBP
Software version 4.0
FieldBusPlug / Issue: 02.0008
V 6
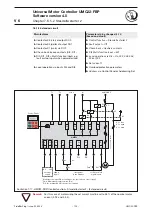
Chapter 7.7.2~1 Pole-changing starter 1
7.7.2 Description
With
Pole-changing starter 1
the outputs DO0 and DO1 are defi ned to drive the contactor coils as
shown in the circuit diagrams.
The contactors are locked electronically to avoid short circuit due to not extinct spark. The minimal
change-over time is fi xed 50 ms.
To keep this lock-out function for Dahlander start also the contactors K81 and K91b must be cont-
rolled by the UMC22 outputs. Contactor K91a is controlled by an auxiliary contact of the contactor
K91b.
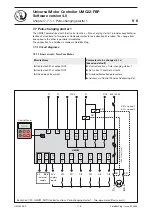
7.7.2.1 Attached control functions
(4.3.1)
The parameter set Attached control functions prepare the UMC22 to support different circuit arrange-
ments including the use of inputs and outputs for particular use.
Examples:
Fault output
(4.3.4)
Activate via Parameter
Fault output = On
:
If a fault appears
- the output contact DO2 closes and
- the internal fault signal is set.
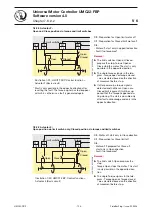
Multi-function inputs DI0, DI1 and DI2
(4.3.4)
Depending of the parameterization of the parameters
DI0 Multi-function input
,
DI1 Multi-function input
and
DI2 Multi-function input
the following functions are possible:
Transparent
(default): status is monitored only to the fi eldbus
Fault signal always / not delayed or delayed
with 1 to 255 s:
The delay time starts whether the motor is running or not.
Fault signal dependent / delayed
with 1 to 255 s:
The delay time starts only when the motor is running.
Motor off always / not delayed or delayed
with 1 to 255 s:
The delay time starts whether the motor is running or not.
Motor off dependent / delayed
with 1 to 255 s:
The delay time starts only when the motor is running.
Reset internal fault signal
Prepare emergency start
: Reset of the thermal memory and of other faults.
Test
Start without motor (no current check-back when started)
Remark:
DI0, DI1 and DI2 can be parametrized via fi eldbus. Only DI2 can be parametrized via Control Panel.
Setting
Check-back = Auxiliary contacts
and
DI0 Multi-function input = not 000
give the input DI0
two colliding tasks.
As a result the internal fault signal is set and monitored via different ways, e.g. Parameter out
of range / F004 (4.2.1). The motor cannot be started.
DI0: can not be parameterized as Fault signal not delayed (reason: compatibility to older versions)
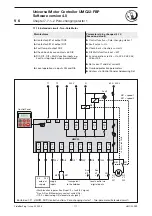
Local control via digital inputs
(4.3.4)
Activate via parameter
Local operation via DIs = On
,
002
,
003, 004, 008
or 009:
- DI3 and DI4 to start the motor, only via active signal possible
- DI5 to stop the motors, depending on the parameterization via closed circuit or active signal possible
Remark:
A simplifi ed local control is possible via Control Panel (
Direct panel control
):
Start, stop and fault reset.
Further functions
(4.3.1)
Other parameters defi ne the protection behaviour and additional functions.







































































