



























- 126 -
UMC22-FBP
Universal Motor Controller UMC22-FBP
Software version 4.0
FieldBusPlug / Issue: 02.0008
V 6
Chapter 7.8.1~1
7.8 Actuator 1, 2, 3 and 4
The UMC22 parametrized with
Control function = Actuator 1, 2, 3 or 4
provides complete control as
well as excellent protection of the Actuator motor.
Three inputs are prepared to monitor the status of the Actuator, depending on the selected Actuator
version, the other three inputs can be parametrized as Fault input or as Local control signals resp.
The connection to a fi eldbus is made via the appropriate type of the FieldBusPlug.
7.8.1 Circuit diagram
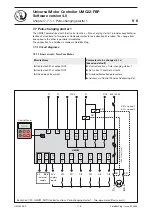
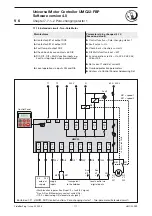
7.8.1.1 Basic circuit
Wiring
Parameters to be changed
(4.3.4)
(based on default)
DO0 / DO1 for Open / Close contactor
Control function = Actuator 1, 2, 3
or
4
DI0 / DI1 for Open / Closed limit switches
Reverse lock-out time
DI3 for Torque switches (closed circuit)
DI2 Multi-function input = 001
DI2 = Multi-function input e.g. Fault inp. for
thermistor module if parametrized
Run time limit = Star-delta starting time
Local operation via Dis = On, 002, 003
or
004
DI4, DI5 for Local Control if parametrized
(motor runs as long as signal = 1)
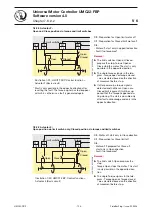
Fault output = On
Set current 1
and
Set current 2
Overload protection parameters
Address
via Control Panel or Addressing Set
UMC22
0
V
10
24
V
11
24
V
12
DI
0
13
DI
1
14
DI
2
15
DI
3
16
DI
4
17
DI
5
18
5
DO
C
T1
T2 7
DO
0
6
DO
C
8
DO
1
9
DO
2
DI2*
0 V
24 V
24 V 24 V
N
230 V
690 / 400 V
T1 T2
external
supply
supply
inputs
Control Panel
Fault
Open
Open
Close
Close
2CDC 342 029 F0207
Local operation
via digital inputs
Close
Open
Closed
Open
*DI2 parameterizable as Multi-function input
Torque
Open /
Closed
Illustration 7-26: UMC22-FBP: Control function = Actuator 2 (Basic circuit)







































































