


























- 20 -
UMC22-FBP
Universal Motor Controller UMC22-FBP
Software version 4.0
FieldBusPlug / Issue: 02.2008
V 6
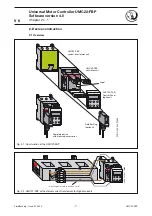
3.2.5 Operation details for motors with small set currents
Using a UMC22 in an environment with very strong magnetic fi elds and a small set current at
the same time the current measurement can deviate a few percent from the real current. Therefore the
displayed motor current is too high and an overload trip occurs too early.
Very strong magnetic fi elds can be originated from a contactor directly mounted beside the UMC22,
closely passing current links or stray fi elds caused by large transformers. When observing the effect the
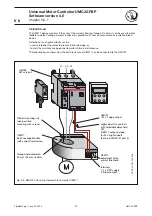
distance between the UMC22 and the contactor shall be increased to about 5 cm or the UMC shall be
rotated by 90 degrees or the motor wires shall be loop through the UMC22 2 to 5 times.
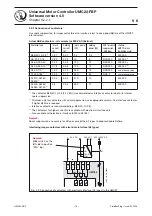
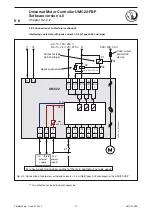
When looping the motor wires multiple times the parameter <Current Factor> must be adjusted accord-
ing the number of loops. I.e. the parameter must be set to two if the wires are looped through the UMC22
two times. Two to fi ve loops are supported. The displayed current and the current transmitted over the
fi eldbus are automatically corrected by the UMC22.
Please note that the adaptation of the current factor for
았
3 circuits (3.2.3) and multiple loops through the
UMC22 are not possible at the same time.
Via fi eldbus also higher values than fi ve - e.g. six - can be set. The UMC22 ignores such values
and creates a <Parameter Fault>. Values above 100 are possible and used in combination with external
current transformers (see capter 3.2.4).
Chapter 3.2.5~1







































































