


























- 119 -
UMC22-FBP
FieldBusPlug / Issue: 02.2008
V 6
Universal Motor Controller UMC22-FBP
Software version 4.0
UMC22
0
V
10
24
V
11
24
V
12
DI
0
13
DI
1
14
DI
2
15
DI
3
16
DI
4
17
DI
5
18
5
DO
C
T1
T2 7
DO
0
6
DO
C
8
DO
1
9
DO
2
N
230 V
690 / 400 V
DI1* DI2*
0 V
24 V
K91a
K91b
K81
K81 K91a
U1
V1
W1
U2
V2
W2
K91b
K81 K91
Run
K1
2)
Off
3)
Run
K2
2)
T1 T2
2CDC 342 028 F0207
Control Panel
Remark:
Output DO1 controls contactor K91b. Do not change!
Fault
Control Panel
K81 = speed 1
K91 = speed 2
external
supply
supply
inputs
* transparent
to the fieldbus
Local control via
digital inputs
1)
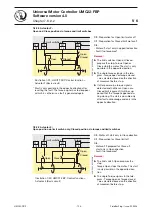
Multi-function input as Fault input: 0 = fault (0 V signal)
2)
Run A, Run B: Momentary-contact switch (On)
3)
Off: 0 = dominating Off (closed-circuit signal)
Chapter 7.7.1~4 Pole-changing starter 1
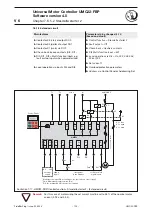
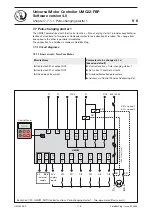
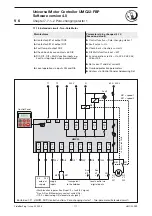
Illustartion 7-23: UMC22-FBP: Control function = Pole-changing starter 1 - Dahlander-Motor (Extended circuit)
7.7.1.4 Extended circuit - Dahlander Motor
Main features
Parameters to be changed
(4.3.4)
(based on default)
Contactor K81 at output DO0
Control function = Pole-changing starter 1
ContactorK91b at output DO1
Fault output = On
Contactor K91a via auxiliary contact of
contactor K91b
Check-back = Auxiliary contacts
DI2 Multi-function input = 001
Fault lamp at output DO2
Local operation via DIs = On,002
,
003, 004,
008
or 009
Check-back by aux.contacts on DI0
Set current 1
and
Set current 2
DI0, DI1, DI2 = Multi-function inputs e.g.
Fault or stop inputs when parametrized
Overload protection parameters
Address
via Control Panel or Addressing Set
Local operation via inputs DI4 and DI5