



























- 109 -
UMC22-FBP
FieldBusPlug / Issue: 02.2008
V 6
Universal Motor Controller UMC22-FBP
Software version 4.0
UMC22
0
V
10
24
V
11
24
V
12
DI
0
13
DI
1
14
DI
2
15
DI
3
16
DI
4
17
DI
5
18
5
DO
C
T1
T2 7
DO
0
6
DO
C
8
DO
1
9
DO
2
DI3*
DI2*
N
230 V
690 / 400 V
0 V
24 V
K1
K1
K5
K5
K3
K3
K3
K5
Fwd
2)
Off
3)
T1 T2
K1
2CDC 342 024 F0207
Control Panel
K3 = star
K5 = delta
K1 = main
external
supply
supply
inputs
* transparent
to the fieldbus
Local control via
digital inputs
1)
Multi-function input DI2 as fault input: 0 = fault (closed circuit signal)
2)
Fwd: Momentary-contact switch (On)
3)
Off: 0 = dominating Off (closed circuit signal)
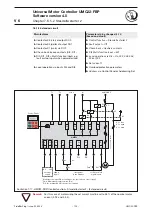
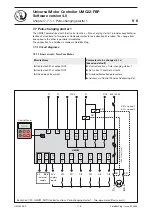
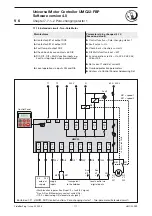
7.6.1.2 Extended circuit
Main features
Parameters to be changed
(4.3.4)
(based on default)
Contactor K3 (star) at output DO0
Control function = Star-delta starter 2
Contactor K5 (delta) at output DO1
Fault output = Off
Contactor K1 (main) via DO2
Check-back = Auxiliary contacts
Check-back by aux.contacts (DI0, DI1)
DI2 Multi-function input = 001
DI0, DI1, DI2 = Multi-function inputs e.g.
fault or stop inputs when parameterized
Local operation via DIs = On, 002, 003, 004,
008 or 009
Set current 1
Local operation via inputs DI4 and DI5
Overload protection parameters
Address
via Control Panel or Addressing Set
Remark:
For this case of motor wiring the set current must be set to 58% of the nominal motor
current (3.2.3 and 4.3.4).
Chapter 7.6.1~2 Star-delta starter 2
Illustration 7-17: UMC22-FBP: Control function = Star-delta starter 2 - (Extended circuit)







































































