





























Note/Illustration
Action
xx1900000110
Access the RobotWare Installation Utilit-
ies.
2
Tap
Advanced
, and then
Restore Hard-
ware Settings
.
3
The
Restore Hardware Settings
window
is displayed.
4
Follow the instructions and tap
Next
to
proceed.
Carefully read the information and then
check all boxes to confirm that you agree
with the ABB conditions. Tap
Next
to
proceed.
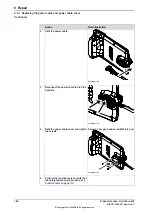
5
xx2000000007
Read the serial number on the front of
the controller and type it in field
Serial
Number
. Tap
Next
.
6
The system compares the downloaded file
and the manually entered serial number to
ensure that there is a match.
Tap
Browse
to open the hardware inform-
ation file from its location. The restoration
of the serial number is completed.
7
146
Product manual - OmniCore E10
3HAC079399-001 Revision: C
© Copyright 2019-2022 ABB. All rights reserved.
5 Repair
5.2.5 Replacing the computer and logic unit
Continued
Содержание OmniCore E10
Страница 1: ...ROBOTICS Product manual OmniCore E10 ...
Страница 2: ...Trace back information Workspace 22A version a10 Checked in 2022 03 02 Skribenta version 5 4 005 ...
Страница 8: ...This page is intentionally left blank ...
Страница 34: ...This page is intentionally left blank ...
Страница 198: ...This page is intentionally left blank ...
Страница 206: ...This page is intentionally left blank ...
Страница 224: ...This page is intentionally left blank ...
Страница 228: ......
Страница 229: ......