





















8.3 Common Parameters and Corresponding Device Parameters
8-12
*1.
The common parameter 84 is linked with Pn817 or Pn824. At factory setting, the value of Pn817 is effective.
When Pn817 is set to zero or a value outside the allowable range, the value of Pn824 will become effective.
After the value of Pn824 become effective, the value stays effective even if the value of Pn817 within the allow-
able range is set to parameter 84.
*2.
The common parameter 85 is linked with Pn818 or Pn844. At factory setting, the value of Pn818 is effective.
When Pn818 is set to zero or a value outside the allowable range, the value of Pn844 will become effective.
After the value of Pn844 become effective, the value stays effective even if the value of Pn818 within the allow-
able range is set to parameter 85.
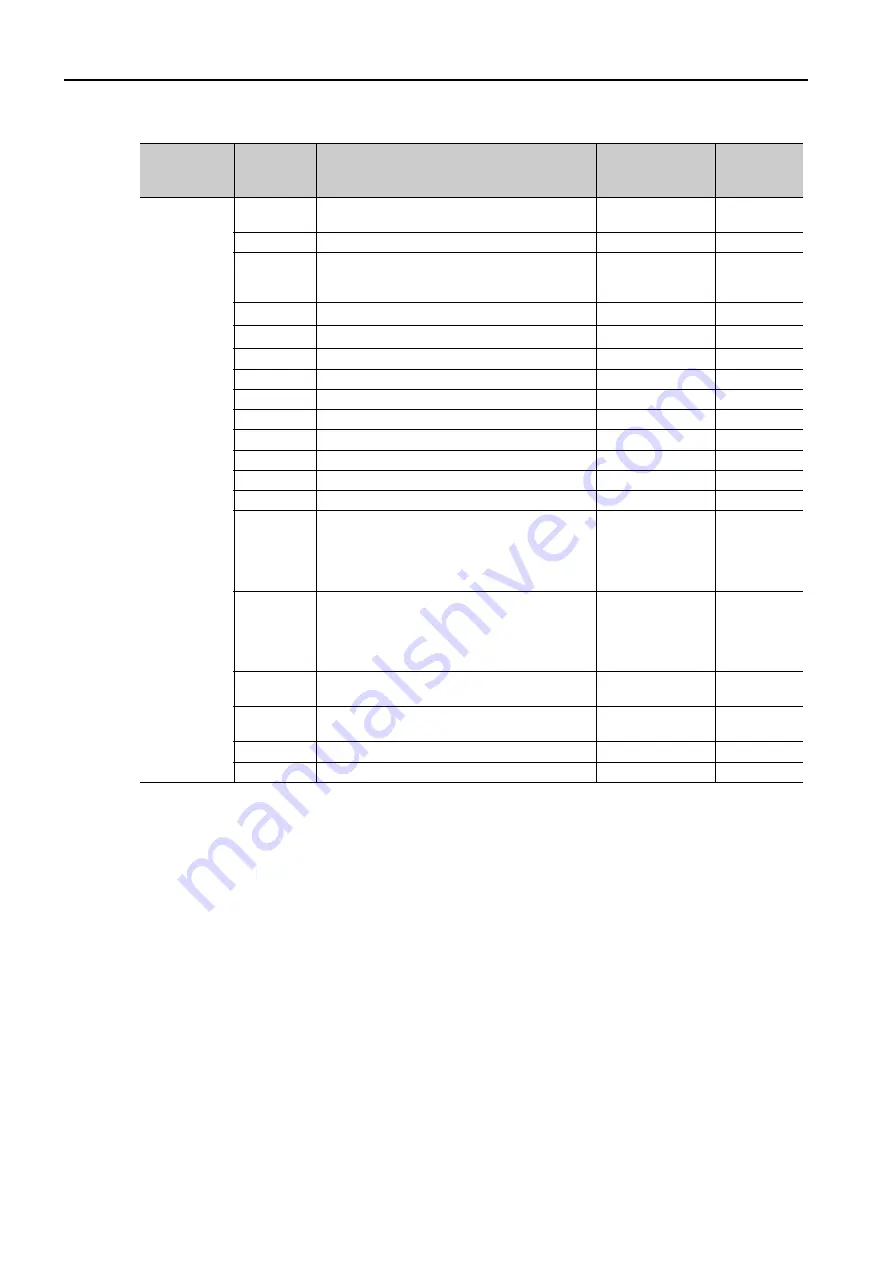
Command
Related
Parameters
81
Exponential Acceleration/Deceleration Time
Constant
Pn811
–
82
Movement Average Time
Pn812
–
83
External Positioning Final Travel Distance
Pn814
EX_POS-
ING, EX_-
FEED
84
*1
Origin Approach Speed
Pn817, Pn842
ZRET
85
*2
Origin Approach Speed
Pn818, Pn844
ZRET
86
Final Travel Distance for Origin Return
Pn819
ZRET
87
Monitor Selection 1
–
–
88
Monitor Selection 2
–
–
89
Monitor Select for SEL_MON1
–
–
8A
Monitor Select for SEL_MON2
–
–
8B
Origin Detection Range
Pn803
–
8C
Forward Torque Limit
Pn404
–
8D
Reverse Torque Limit
Pn405
–
8E
Zero Speed Detection Range
Rotational
servomotor:
Pn502,
Linear servomo-
tor:Pn581
–
8F
Speed Coincidence Signal Detection Width
Rotational
servomotor:
Pn503,
Linear servomo-
tor:Pn582
–
90
Servo Command Control Field Enabled/Dis-
abled
–
–
91
Servo Command Status Field Enabled/Dis-
abled
–
–
92
I/O Bit Enabled/Disabled (Output)
–
–
93
I/O Bit Enabled/Disabled (Input)
–
–
Continued from previous page.
Category
Common
Parameters
Meaning
Corresponding
Device Parame-
ter
Remark







































































