





























3.2 Servo Commands
3.2.14 Zero Point Return Command (ZRET: 3Ah)
3
Main Command
s
3-47
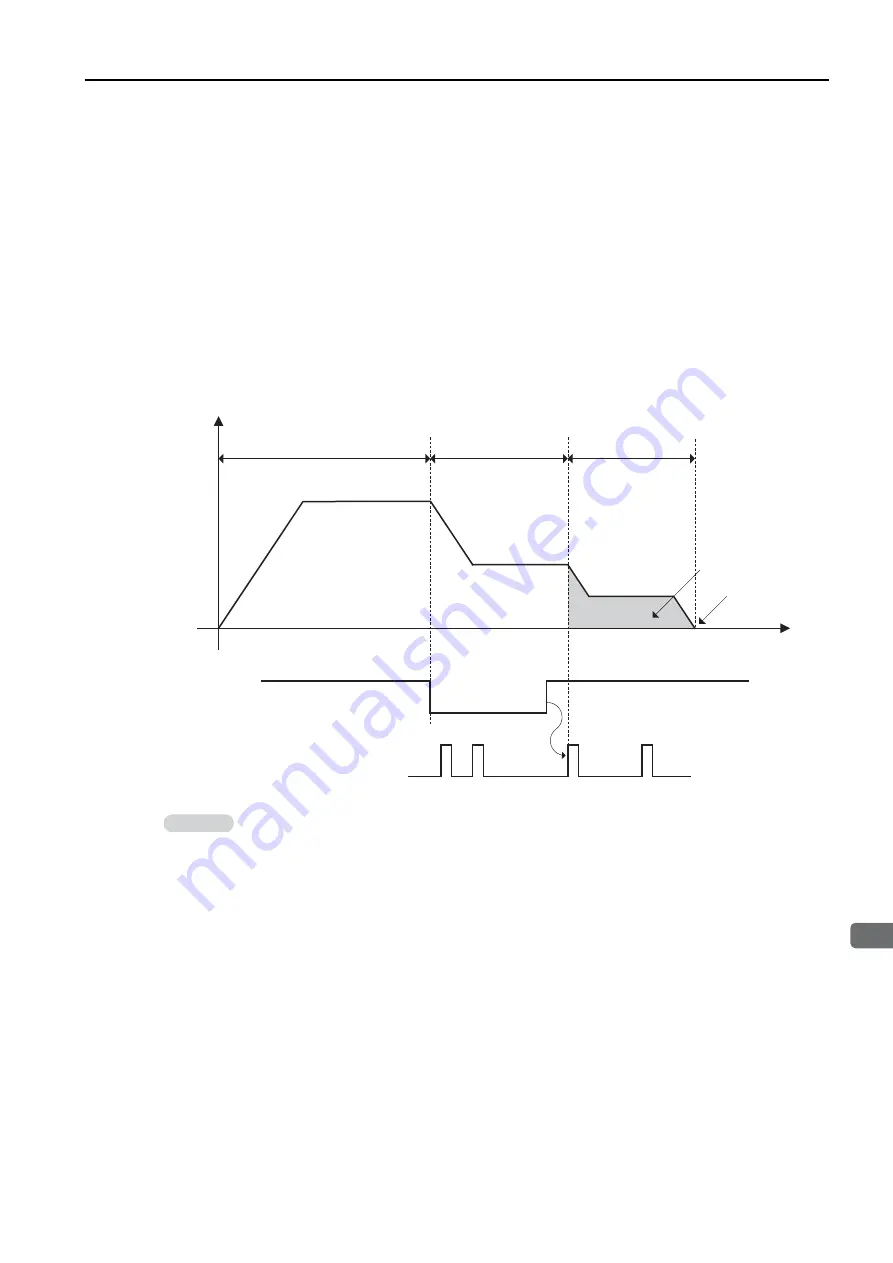
MODE = 1 (Deceleration Limit Switch Latch Signal)
1.
The master station sends the ZRET command. It selects the latch signal with LT_SEL1
of SVCMD_CTRL and outputs the latch request by setting LT_REQ1 = 1.
2.
The slave station starts feeding in the direction specified by MODE.HOME_DIR at the
speed set in the "TSPD" field.
3.
When the "deceleration limit switch" is closed (DEC = 1), the feed speed is switched to
the Homing Approach Speed (common parameter 84).
4.
When the current position latch signal, specified by LT_SEL1 of SVCMD_CTRL, is input
after the "deceleration limit switch" is opened (DEC = 0), the slave station executes
positioning through the movement of the Final Travel Distance for Homing (common
parameter 86) at the Homing Creep Speed (common parameter 85). After the comple-
tion of positioning, the slave station sets the zero point of the reference coordinate sys-
tem.
The motion direction after latching is determined by the sign of the value set for the Final
Travel Distance for Homing.
If the Final Travel Distance for Homing is a positive value:
•
After latching during motion in the positive direction, the motor rotates in the positive direc-
tion (the same direction) for positioning.
•
After latching during motion in the negative direction, the motor rotates in the positive
direction (the reverse direction) for positioning. (With ZRET in the MECHATROLINK-II com-
patible profile, the motor rotates in the negative direction (the same direction) for position-
ing.)
If the Final Travel Distance for Homing is a negative value:
•
After latching during motion in the positive direction, the motor rotates in the negative
direction (the reverse direction) for positioning.
•
After latching during motion in the negative direction, the motor rotates in the negative
direction (the same direction) for positioning. (With ZRET in the MECHATROLINK-II com-
patible profile, the motor rotates in the positive direction (the reverse direction) for position-
ing.)
S
peed
Time
Po
s
ition latch
s
ignal
Deceleration
limit
s
witch
Open
Clo
s
e
(4)
(2)
(
3
)
Feed
s
peed
Approach
s
peed
Creep
s
peed
Final travel di
s
tance
for zero point return
Zero point
Information