


























4 Trial Operation
4.3.4 Trial Operation in Position Control
4-8
8
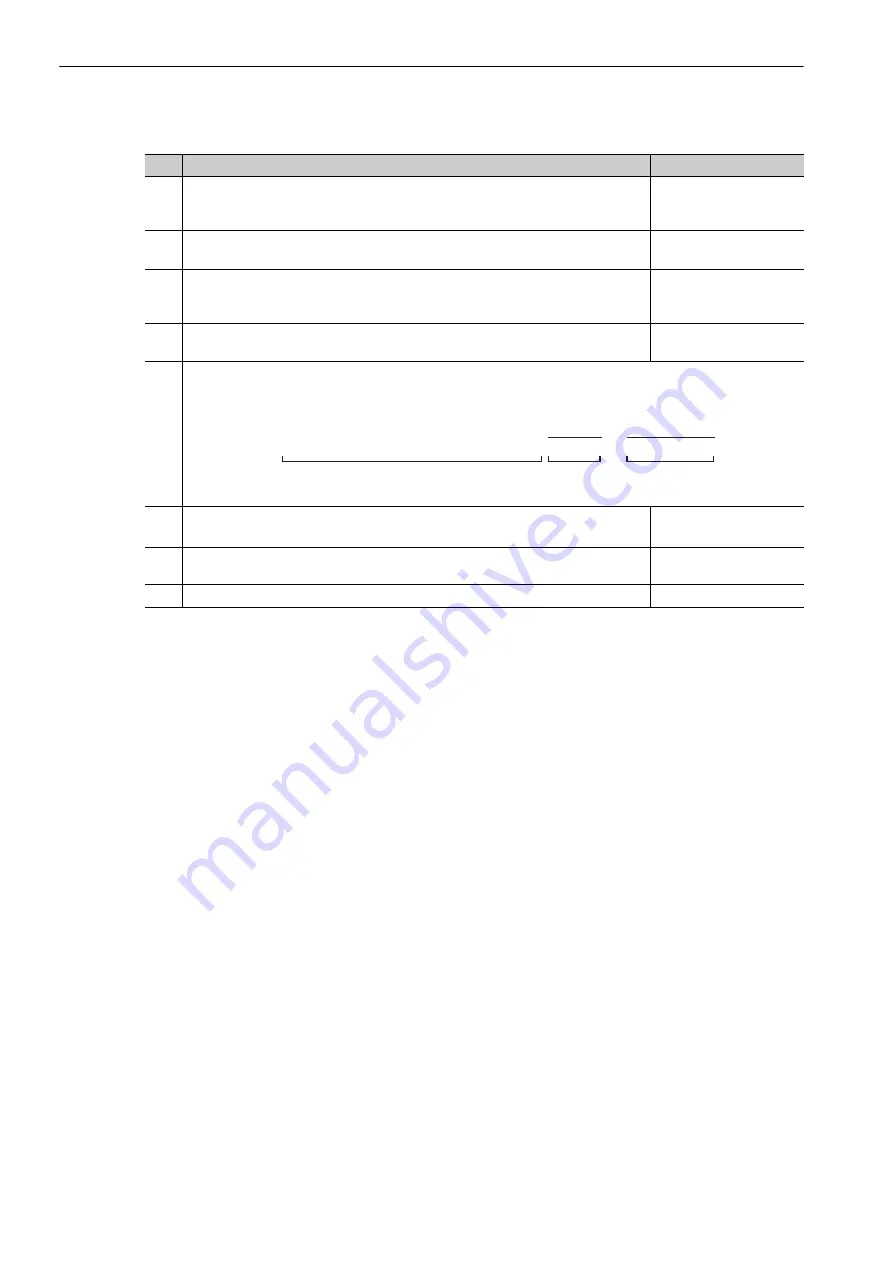
Check the actual number of motor rotations from the changes in the feedback pulse
monitor before and after the reference.
The feedback pulse can be checked with Un00D.
−
9
Check that step 7 and step 8 satisfy the following formula.
Un00D = Un00C
×
(Pn20E/Pn210)
−
10
Check that the servomotor is rotating in the direction specified by the reference.
Note: To switch the motor rotation direction without changing the polarity of the
input pulse, refer to
5.2.2 Servomotor Rotation Direction.
5.2.2 Servomotor Rota-
tion Direction
11
Input a pulse reference for a comparatively large number of motor rotations from the
host controller so that the servomotor will rotate at a constant speed.
−
12
Check the reference pulse speed input to the SERVOPACK from the input reference pulse speed monitor (min
-1
).
The input reference pulse speed can be checked with Un007.
Note: Obtain Un007 from the following formula (if the model uses a 20-bit encoder)
.
13
Check the motor rotating speed (min
-1
). The motor rotating speed can be checked
with Un000.
−
14
Check that the values in step 12 and step 13 (Un007 and Un000) are equal to each
other.
−
15
Stop the pulse reference and turn OFF the servo ON signal (/S-ON).
−
(cont’d)
Step
Operation
Reference
Un007
input reference pulse speed
㨇
pulses/s
㨉
×
60
×
Pn210
Pn20E
1
2
=1048576
20
×
Reference input pulse speed
Electronic
gear ratio
Encoder
pulse







































































