



























5 Operation
5.11.1 Hard Wire Base Block (HWBB) Function
5-78
(1) Risk Assessment
When using the HWBB function, be sure to perform a risk assessment of the servo system in advance. Make
sure that the safety level of the standards is met. For details about the standards, refer to
Harmonized Stan-
dards
at the front of this manual.
Note 1. Applications for certification are pending to show that SERVOPACKs comply with rules and regulations for
North American and other safety standards, including those for safe performance.
2. To meet the performance level d (PLd) in EN ISO 13849-1, the EDM signal must be monitored by a host control-
ler. If the EDM signal is not monitored by a host controller, the system only qualifies for the performance level c
(PLc).
The following risks can be estimated even if the HWBB function is used. These risks must be included in the
risk assessment.
• The servomotor will move in an application where external force is applied to the servomotor (for example,
gravity on the vertical axis). Take measures to secure the servomotor, such as installing a mechanical brake.
• The servomotor may move within the electric angle of 180 degrees in case of the power module failure, etc.
Make sure that safety is ensured even in that situation.
The maximum motor rotation angle is 1/6 of a rotation (This is the converted rotation angle for the motor
shaft).
• The HWBB function does not shut off the power to the SERVOPACK and converter or electrically isolate
them. Take measures to shut off the power to the SERVOPACK and converter before performing mainte-
nance on them.
(2) Hard Wire Base Block (HWBB) State
The SERVOPACK will be in the following state if the HWBB function operates. If the /HWBB1 or /HWBB2
signal is OFF, the HWBB function will operate and the SERVOPACK will enter a hard wire baseblock
(HWBB) state.
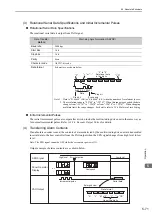
(3) Resetting the HWBB State
Usually after the servo ON signal (/S-ON) is turned OFF, the SERVOPACK will then enter a hard wire base-
block (HWBB) state with the /HWBB1 and /HWBB2 signals turned OFF. By then turning the /HWBB1 and /
HWBB2 signals ON in this state, the SERVOPACK will enter a baseblock (BB) state and can accept the servo
ON signal.
If the /HWBB1 and /HWBB2 signals are OFF and the servo ON signal is ON, the HWBB state will be main-
tained after the /HWBB1 and /HWBB2 signals are turned ON.
Turn OFF the servo ON signal, and the SERVOPACK is placed in a BB state. Then turn ON the servo ON sig-
nal again.
/HWBB1
/HWBB2
/S-ON
SERVOPACK
state
ON
ON (Normal operation)
OFF
HWBB state
BB state
Operating
OFF
(Motor current shut-off request)
/HWBB1
/HWBB2
/S-ON
OFF
(Motor current
shut-off request)
SERVOPACK
state
OFF
HWBB state
BB state
Operating
ON (Normal operation)
ON







































































