




























6.2 Advanced Autotuning (Fn201)
6-11
6
Adjustments
6.2
Advanced Autotuning (Fn201)
With advanced tuning for the multi-winding drive system, adjustment is performed only for moment of inertia
calculation.
6.2.1
Calculating the Moment of Inertia
To calculate the load moment of inertia, the multi-winding drive unit and SERVOPACKs perform automatic
operation (reciprocal forward and reverse operation) and the moment of inertia is calculated during operation.
The parameter that sets the moment of inertia ratio (ratio of the load moment of inertia to the motor moment of
inertia) forms a standard for adjusting the gain, and therefore must be set as accurately as possible.
The load moment of inertia can be calculated from the mass and composition of the mechanical section, but
doing so is troublesome and accurate calculation has become difficult with the complexity of current mechan-
ical compositions. You can use this calculation function to get a highly accurate load moment of inertia simply
by driving the actual motor in forward and reverse a few times.
The following automatic operation specifications apply.
• Maximum speed: Rated motor speed
×
2/3
• Acceleration torque: Approximately 100% of rated motor torque
The acceleration torque varies with the influence of the moment of inertia ratio
(Pn103), machine friction, and external disturbance.
• Travel distance: The travel distance can be set freely. The distance is factory-set to a value equivalent to 3
motor rotations.
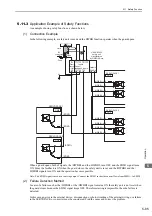
(1) Preparation
Check the following settings before performing advanced autotuning.
The message “NO-OP” indicating that the settings are not appropriate will be displayed, if all of the following
conditions are not met.
• The main circuit power supply must be ON.
• There must be no overtravel.
• The servo ON signal (/S-ON) must be OFF.
• The control method must not be set to torque control.
• The gain selection switch must be in manual switching mode (Pn139.0 = 0).
• Gain setting 1 must be selected.
• All alarms and warning must be cleared.
• The hardwire baseblock (HWBB) must be disabled.
• The write prohibited setting parameter (Fn010) must be set to Write permitted (P.0000).
CAUTION
• Because advanced autotuning adjusts the multi-winding drive unit during automatic operation, vibration or
overshooting may occur. To ensure safety, perform advanced autotuning in a state where the multi-winding
drive unit can come to an emergency stop at any time.
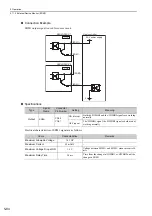
Multi-winding
drive unit
*
Execute advanced autotuning
after a JOG operation to move
the position to ensure a suitable
movement range.
SERVOPACK
Travel distance
Movement
speed
Reference
Response
t: time
t: time
Rated motor
speed
×
2/3
Rated motor
speed
×
2/3
Rated motor
torque
Approx. 100%
Rated motor
torque
Approx. 100%
Automatic operation







































































