


























5 Operation
5.8.3 Torque Limiting Using an Analog Voltage Reference
5-58
(1) Input Signals
Use the following input signals to limit a torque by analog voltage reference.
Refer to
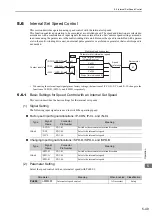
5.5.1 Basic Settings for Torque Control
.
(2) Related Parameters
Set the following parameters for torque limit by analog voltage reference.
Type
Signal Name
Connector
Pin Number
Name
Input
T-REF
CN1-9
Torque reference input
SG
CN1-10
Signal ground for torque reference input
Pn400
Torque Reference Input Gain
Classification
Setting Range
Setting Unit
Factory Setting
When Enabled
10 to 100
0.1 V
30
(Rated torque at 3.0 V)
Immediately
Setup
Pn402
Forward Torque Limit
Classification
Setting Range
Setting Unit
Factory Setting
When Enabled
0 to 800
1%
800
Immediately
Setup
Pn403
Reverse Torque Limit
Classification
Setting Range
Setting Unit
Factory Setting
When Enabled
0 to 800
1%
800
Immediately
Setup
Pn415
T-REF Filter Time Constant
Classification
Setting Range
Setting Unit
Factory Setting
When Enabled
0 to 65535
0.01 ms
0
Immediately
Setup
Speed
Position
Torque
Speed
Position
Torque
Speed
Position
Torque
Speed
Position
Torque







































































