



























10 Appendix
10.2.2 Parameters
10-18
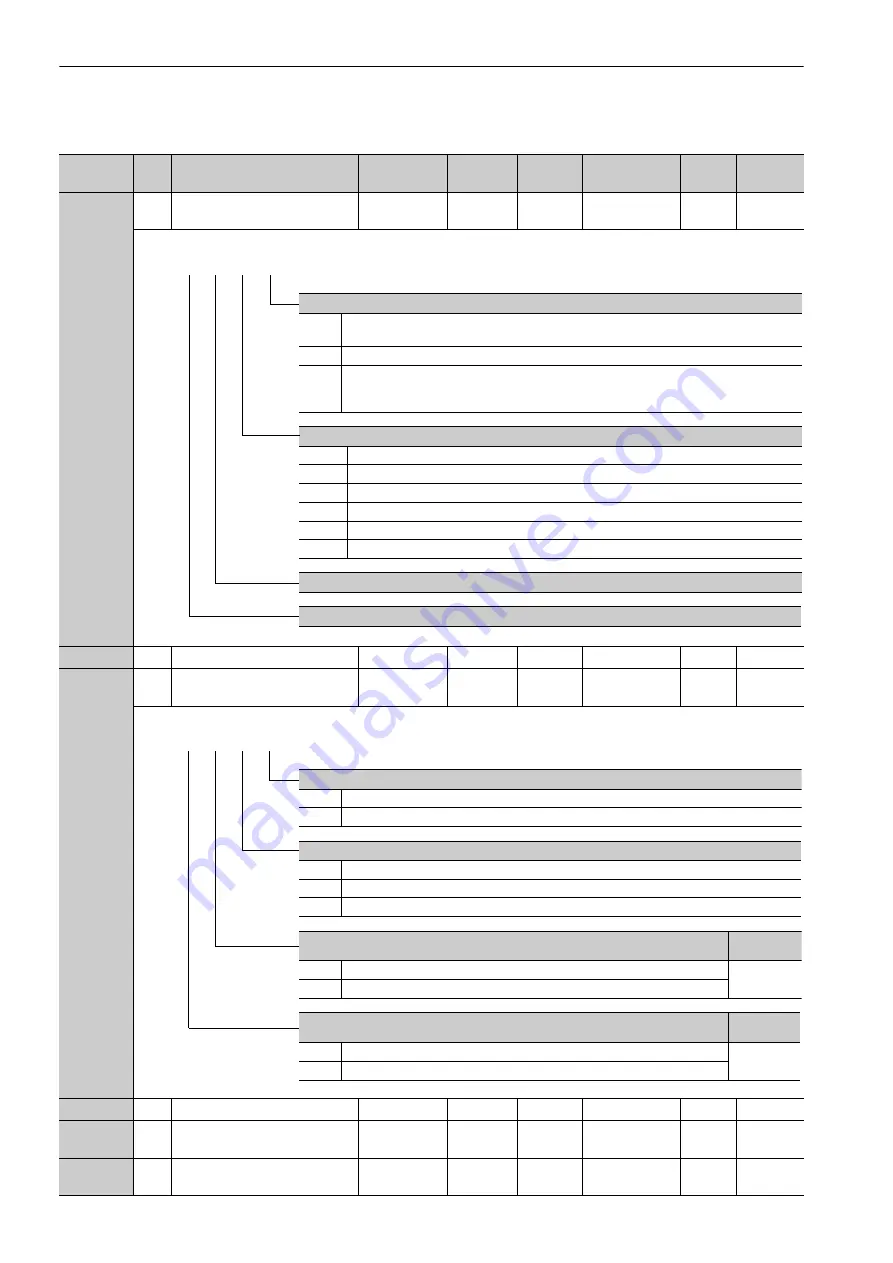
Pn139
2
Automatic Gain Changeover
Related Switch 1
0000 to 0052
−
0000
Immediately
Tuning
6.6.1
Pn13D
2
Current Gain Level
100 to 2000
1%
2000
Immediately
Tuning
6.6.4
Pn140
2
Model Following Control
Related Switch
0000 to 1121
−
0100
Immediately
Tuning
−
Pn141
2
Model Following Control Gain
10 to 20000
0.1/s
500
Immediately
Tuning
−
Pn142
2
Model Following Control Gain
Compensation
500 to 2000
0.1%
1000
Immediately
Tuning
−
Pn143
2
Model Following Control Bias
(Forward Direction)
0 to 10000
0.1%
1000
Immediately
Tuning
−
(cont’d)
Parameter
No.
Size
Name
Setting
Range
Units
Factory
Setting
When Enabled Classifi-
cation
Reference
Section
Gain Switching Selection Switch
0
Manual gain switching
Changes gain manually using external input signal (/G-SEL) .
1
Reserved (Do not use.)
2
Automatic gain switching pattern 1
Changes automatically 1st gain to 2nd gain when the switching condition A is satisfied.
Changes automatically 2nd gain to 1st gain when the switching condition A is not satisfied.
Gain Switching Condition A
0
Positioning completion signal (/COIN) ON
1
Positioning completion signal (/COIN) OFF
2
Positioning near signal (/NEAR) ON
3
Positioning near signal (/NEAR) OFF
4
Position reference filter output = 0 and reference pulse input OFF
5
Position reference pulse input ON
Reserved (Do not change.)
Reserved (Do not change.)
4th 3rd 2nd 1st
digit digit digit digit
n.
Model Following Control Selection
0
Does not use model following control.
1
Uses model following control.
Vibration Suppression Selection
0
Does not perform vibration suppression.
1
Performs vibration suppression over the specified frequency.
2
Performs vibration suppression over two different kinds of frequencies.
Vibration Suppression Adjustment Selection
Reference
Section
0
Does not adjust vibration suppression automatically using utility function.
6.2.1, 6.4.1,
6.3.1, 6.5.1
1
Adjusts vibration suppression automatically using utility function.
Selection of Speed Feedforward (VFF) / Torque Feedforward (TFF)
Reference
Section
0
Does not use model following control and speed/torque feedforward together.
6.2.1, 6.4.1
1
Uses model following control and speed/torque feedforward together.
4th 3rd 2nd 1st
digit digit digit digit
n.







































































