





























74
Operation
SeaBat Sonar UI - User Manual
By default the scaling of the data is set to Auto Scaling. Deactivate the
Auto button
from the toolbar to set manually the Threshold, Gain, and
TVG for the image in the Snippets screen.
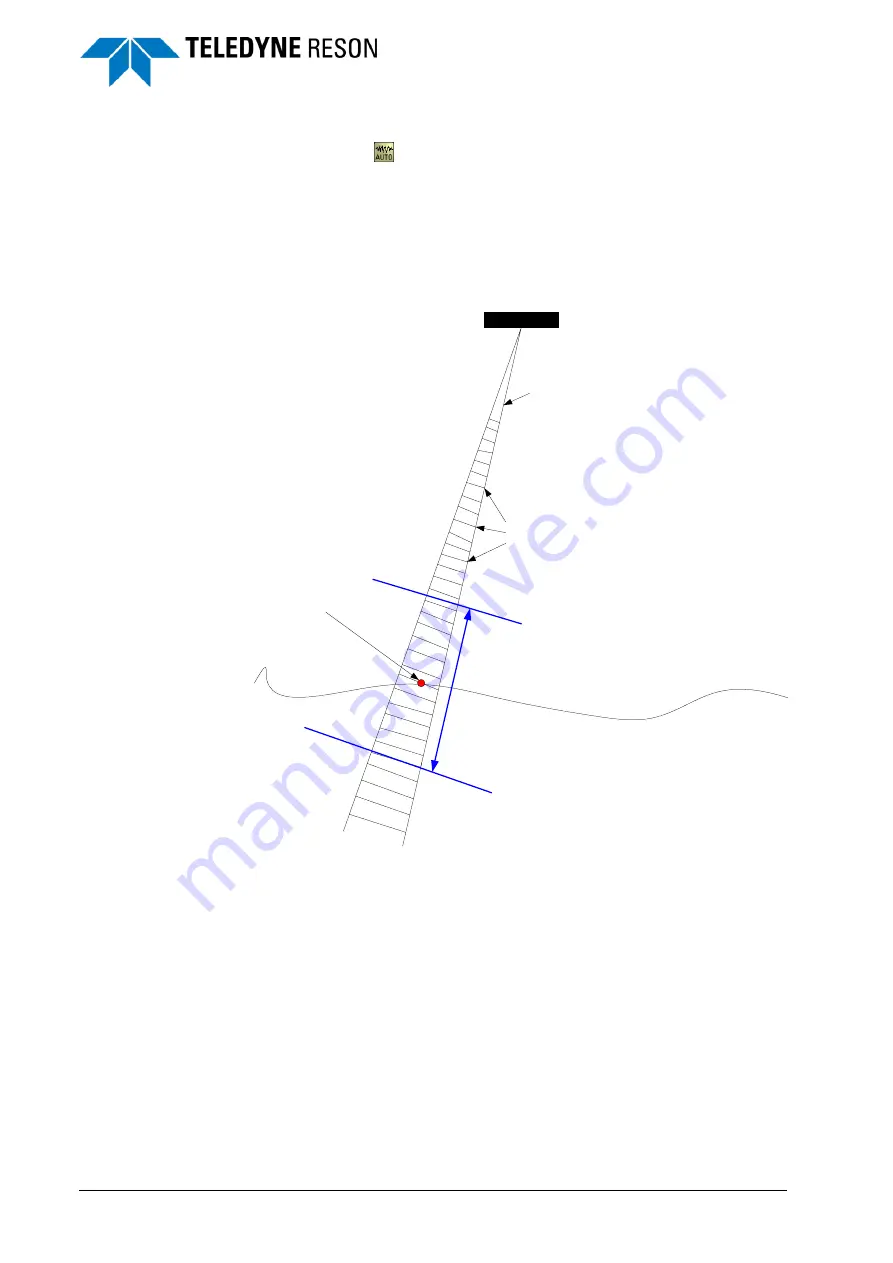
A snippets data sample contains corrected backscatter data from the
‘footprint’ on the seabed illuminated by a single sonar ping. The number
of snippets in a swath is a function of the number of sonar beams. The
length of each snippet depends on the operating mode, beam number,
and depth. The snippets window can also be set manually.
Figure 4-93
Snippets data
Each snippets data packet contains pertinent information such as time
stamp, sequential ping number, sample rate, sound velocity, and operator
settings such as power, gain, absorption, and range scale.
The waterfall data is automatically adjusts to the ranges in the history.
For dual head systems; the snippets view shows always the combined
data of the two heads. This data is normalized if the normalize
backscatter license is activated.
4.11.9 Helmsman
The helmsman screen is used in combination with the pipe detection
functionality as navigation guidance for the operator (e.g. ROV pilot). It
displays the pipe detection and the pipe route relative to the the position
Seafloor
A single beam
receiver
Bottom detection point
Detect the bottom in each beam and then select a number
of samples on each side of the bottom detection point.
Export this data as a “snippet” for each beam.
Samples in each beam





















































