





























52
Operation
SeaBat Sonar UI - User Manual
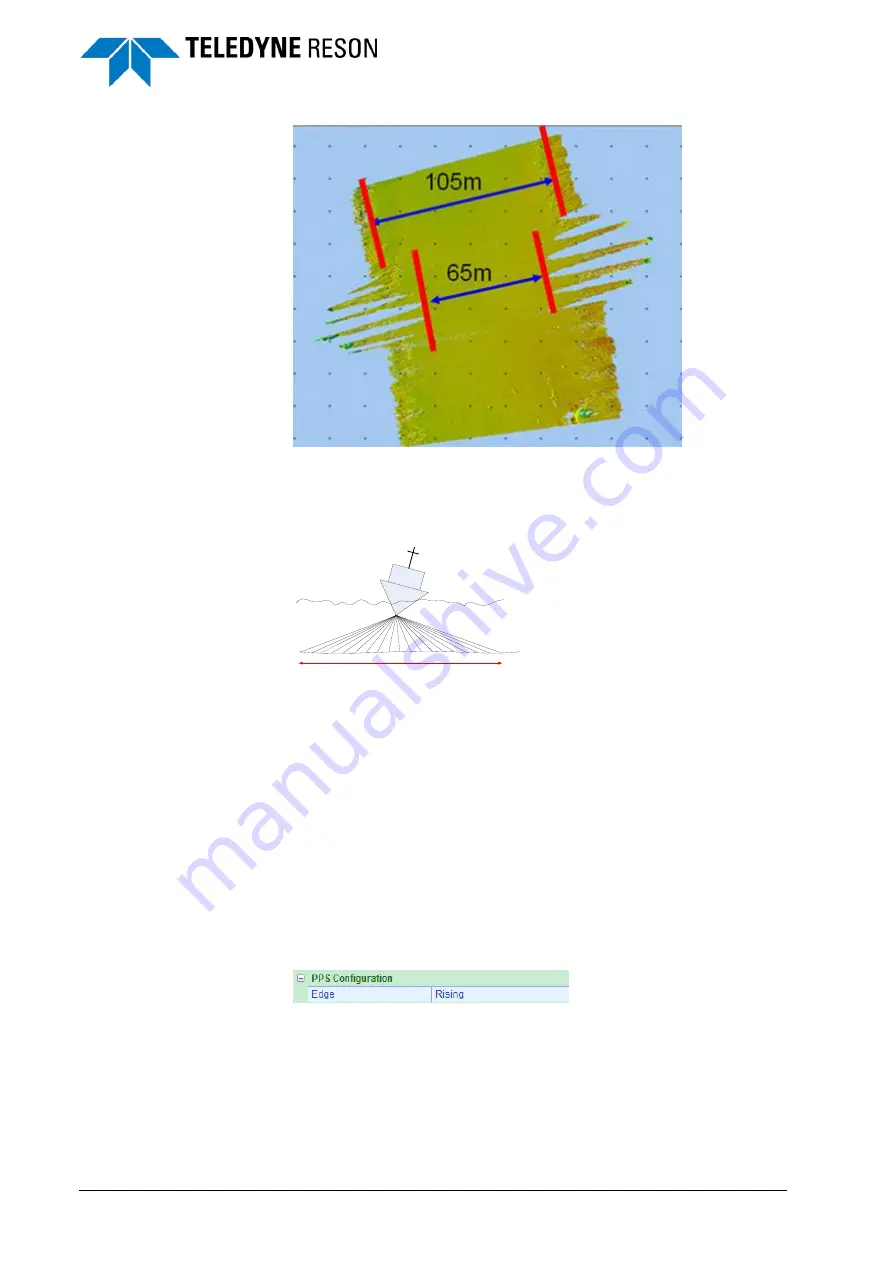
Figure 4-60
Reduced usable swath width
With the input from a motion sensor (and roll stabilization enabled) to
steer each receive beam dynamically for every sample, the swath stays
vertical irrespective of vessel motion thereby maximizing swath.
Figure 4-61
Swath under roll stabilization
4.9.2.2 Pitch Stabilization
Pitch stabilization is a feature which allows the swaths to look vertical
when the vessel is pitching.
Under zero pitch conditions, the swath is vertical and directly below the
vessel. With a pitch the swath is moved forwards/backward relative to the
vertical. It is possible that the swath projection on the seafloor is not in
order anymore.
To solve this problem the transmitted beam can be dynamically steered
so the swath stays vertical.
It depends on the type of sonar if the pitch stabilization is available.
4.9.3 PPS Configuration
Figure 4-62
Hardware part for the PPS Configuration
By default the Sonar system accepts positively polarized (Rising edge)
1PPS pulses to perform accurate time stamping.
Select Falling when a negative polarized 1PPS is used.





















































