36
Operation
SeaBat Sonar UI - User Manual
.
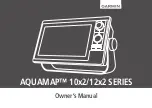
Figure 4-34
Clicked in the ‘Driver Name’ field of the Attitude device to have the
attitude driver list available
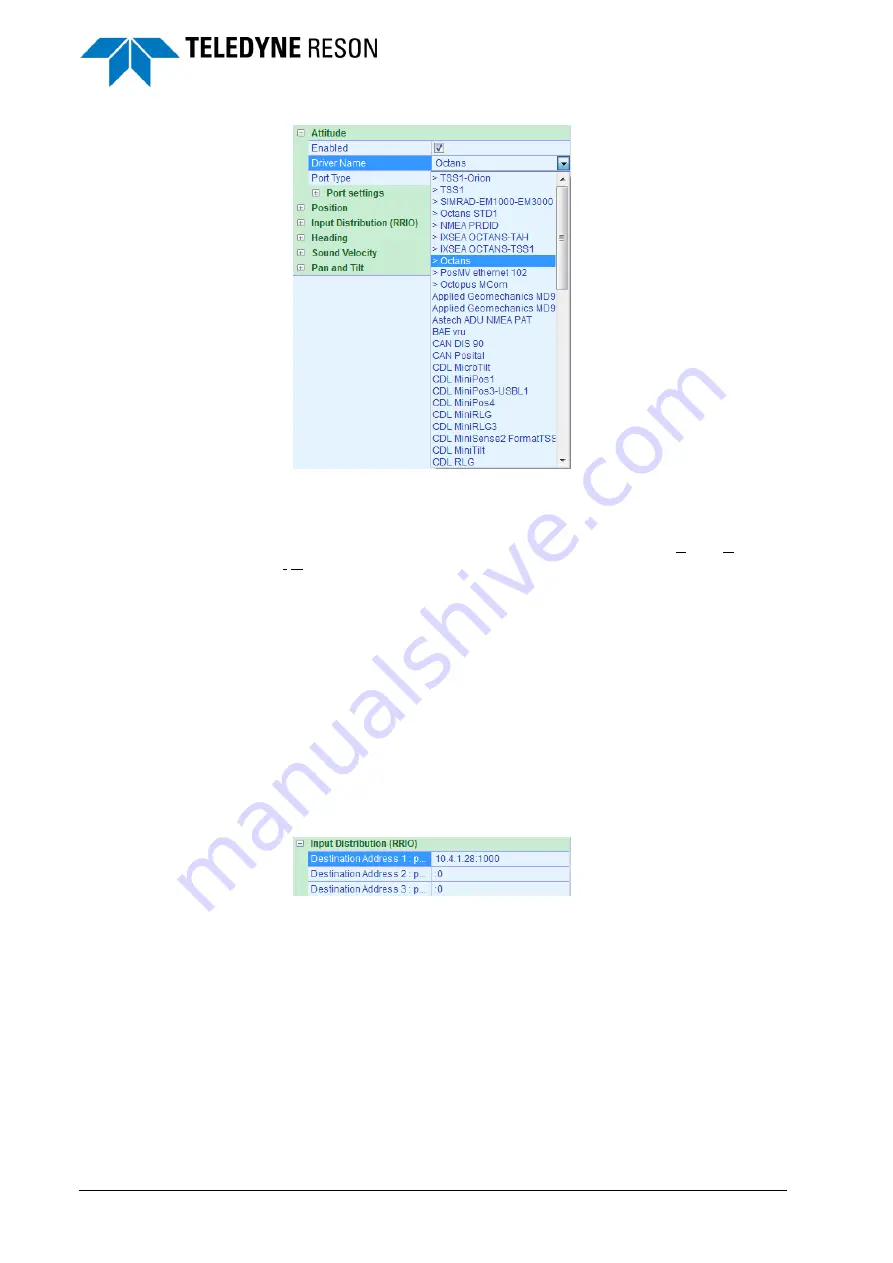
In the I/O pane also the Input distribution (RRIO) is listed. This is not a
device as the other listed items are. The ‘Input distribution (Reson Remote
I/O
)’ can be used when the operator wants to send one of the this different
device data to another system, like an acquisition computer,
Enter as Destination Address the IP Address or computer name followed
with ‘:’ and a port number; for instance: ‘10.4.1.28:1000’.
The port number is the base port and offset of the base port, depending of
the source of the message. Currently this is for:
VRU Base port (e.g. 2020)
Position System. Base port + 2 (e.g. 2022)
Compass Base. port + 4 (e.g. 2024)
Sound Velocity. Base port + 6 (e.g. 2026)
External Clock. Base port + 8 (e.g. 2028)
Pan and Tilt. Base port + 10 (e.g. 2030)
Figure 4-35
Input Distribution
Do not use a port number between 6990 and 7000 as otherwise port
conflicts may occur with the 7kCenter.
4.5.1 Sound Velocity
To achieve correct beam steering in equidistant mode, the sonar needs to
have an up-to-date online sound velocity measurement from the water in
the area of the sonar head. The sound velocity
must always
be selected
in the IO Module, even if PDS2000 or a different acquisition system is
used. Set the associated settings for the connected sound velocity device.