





























SeaBat Sonar UI - User Manual
Operation
35
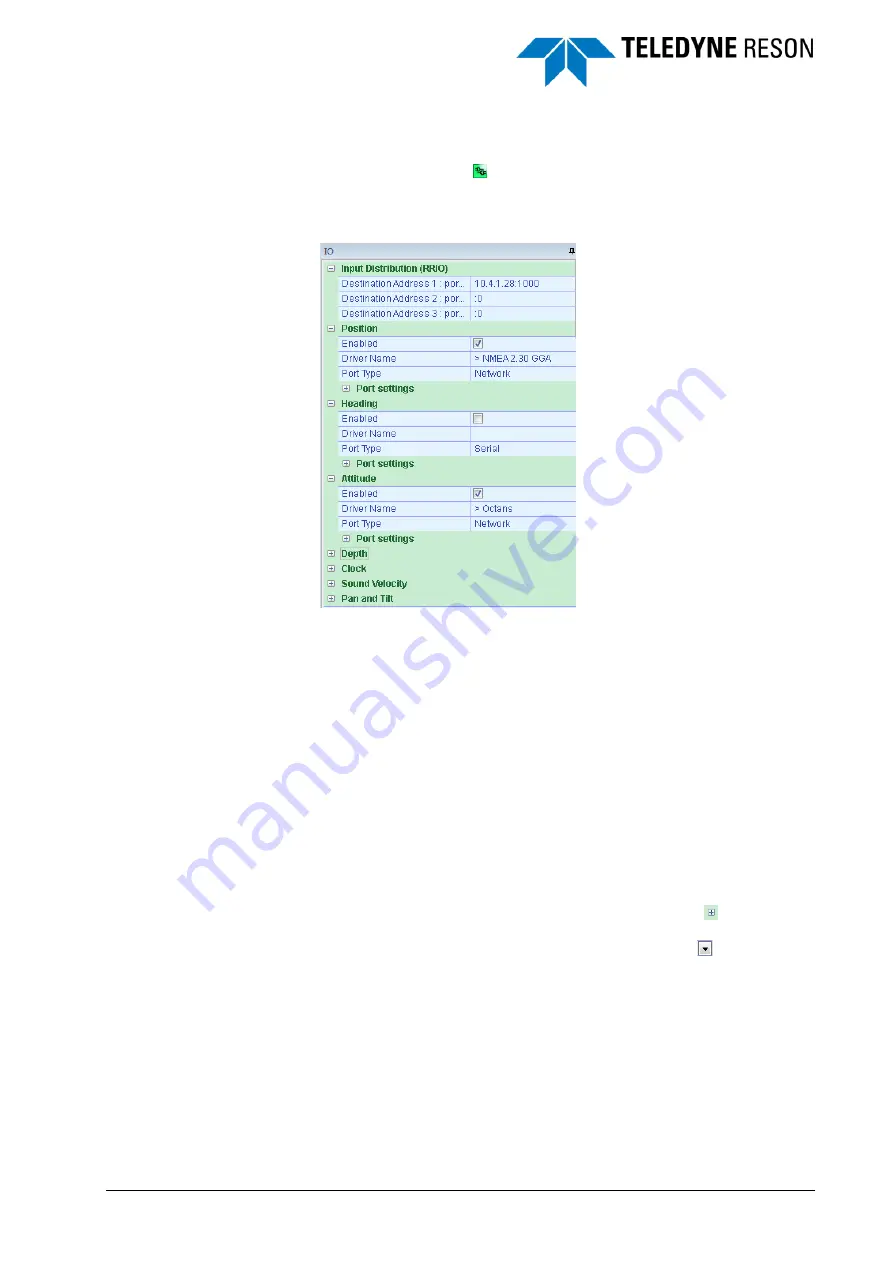
4.5 IO Module
In the IO Module pane the different sensors (such as the sound velocity
probe and the external clock) can be interfaced with the IO Module. The
data acquired by the IO Module is routed to the Sonar in real time to allow
for accurate time stamping and Beamforming.
Figure 4-33
IO Module pane
Accuracy of the bathymetric data depends entirely on a valid time sync
and sound velocity input from the IO Module. In the absence of time sync,
a software time stamp is employed. However, this usually results in poor
data quality, as the time stamp is applied AFTER the last sample is
received. In the absence of online sound velocity input, the input as set in
the Advanced Control (see page 33) is used instead.
If data has to be logged in the S7K file, it is advisable to log the position,
heading and attitude as well. This can be done by interfacing these
sensors in the IO Module. If PDS2000 is used as acquisition system
select in PDS2000
the ‘R7k-IOmodule’ driver as output and PDS2000
outputs the data to the IO Module. The advantage of using PDS2000 is
then that the operator doesn’t have to select the position, heading and
attitude in the IO Module Settings pane, the interfacing is done
automatically and is not visible in the IO Module.
To setup or make changes, click in front of the device the
symbol to
make the setup page of the device visible. Click in a field (eg ‘Driver
Name’) to make a drop-down list active. Press the arrow at the end of
the field to make a list displayed. Click on the required field to select the
applicable driver or parameter.