





























6-7
6-9-2. Tool compensation
It is a function to be used when a tool is deviated. It calculates the
deviation value and then adjusts taught programs that use the tool
according to the calculation.
The tool compensation value is unique to each tool offset.
Therefore, once a tool compensation value is set, the adjust
value will be applied to all taught programs using the same tool
offset. The value is effective until the next time the tool offset
value is changed.
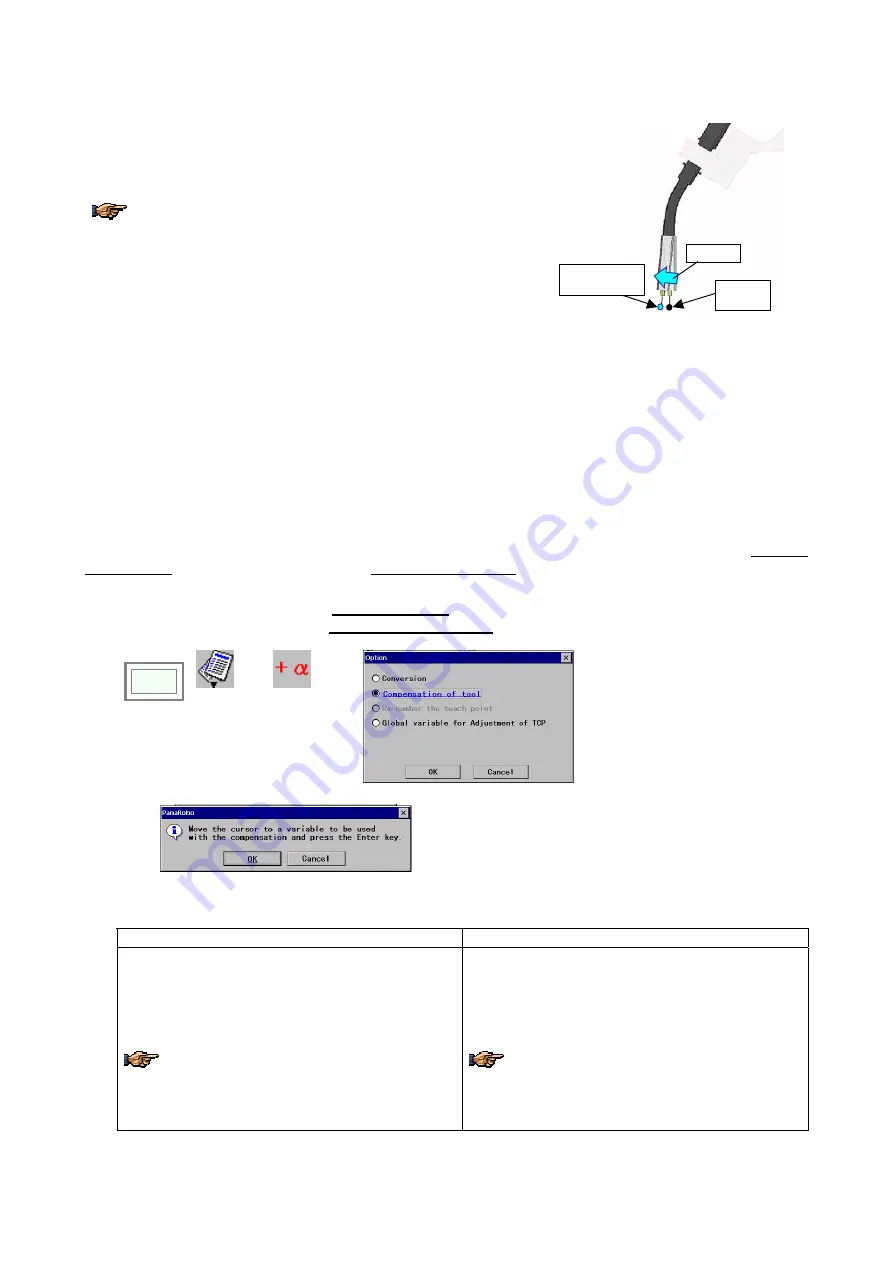
Teaching
point
Deviation
Teaching point
after deviation
<Note>
·
Tool compensation may not be applicable depending on how severe the deviation of the tool is. Tool
compensation may not be within allowable range of the users.
Make sure to perform trace operation to check robot movement of related programs once the tool
compensation is applied.
·
Please note that in the tool offset dialog box , the original tool offset values are indicated at any time. In
other words, the tool compensation value won’t be reflected to the tool offset values even if the tool
compensation is applied.)
·
Such adjust values will be reflected to each teaching point at edit operation.
Setting procedure:
There are two ways to set the tool compensation, which are
①
using one taught point of a taught program (
teaching
point method
) and
②
using the robot variable (
robot variable method
).
1.
•
With the teaching point method,
Open the program
you would like to use to set tool compensation.
•
With the robot variable method,
Close all active programs
to start settings.
2
Click
>>
Edit
>>
Option
Î
Select the “Compensation of tool”
and then click the
OK
button.
3.
Click the
OK
button.
Move the cursor to the taught point (or to the variable
in case of robot variable method is applied) you would
like to use as the datum of the tool compensation
calculation, and then press the
ENTER
key.
4.
Then dialog boxes to confirm the cursor position and the action, click the
OK
button.
5.
Teaching point method
Robot variable method
Move the robot manually and teach a point and then
press the ENTER key.
(The tool compensation value will be calculated from
the data of the current taught point and the taught point
specified as the datum in preceding procedure.)
In case of a calculation error occurs, repeat the
setting procedure from the beginning or change
the datum taught point.
Move the robot manually and teach the point of the
specified variable, and then press the ENTER key.
(The tool compensation value will be calculated from
the data of the current taught point and the taught point
specified as the datum in preceding procedure.)
In case of a calculation error occurs, repeat the
setting procedure from the beginning or change
the datum taught point.
6.
Then click the
OK
buttons on the dialog boxes to confirm the tool compensation and to complete the settings.