




























Part 2: Review on Replacement of MR-J2S-_A_ with MR-J4-_A_
2 - 42
MR-J2S-_A_
MR-J4-_A_
Control
mode
No.
Name and function
Initial
value
No.
Name and function
Initial
value
62 Position loop gain 2 changing ratio
Used to set the changing ratio for position loop gain 2
when the gain switching is enabled.
This parameter is enabled when auto tuning is disabled.
Setting range: 10 to 200
100
PB30 Gain switching position loop gain
When a value smaller than 1.0 rad/s is set, the value
will be the same as the setting value of [Pr. PB08].
This parameter is enabled only when "Manual mode
(_ _ _ 3)" is selected in "Gain adjustment mode
selection" of [Pr. PA08].
Setting range: 0.0 to 2000.0
Because the setting unit is different from that for
MR-J2S-_A_, calculate the setting value using the
equation below and set it.
[Pr. PB30] = [Pr. PB08] × MR-J2S-_A_ [Pr. 62]/100
0.0 P
63 Speed loop gain 2 changing ratio
Used to set the changing ratio for speed loop gain 2
when the gain switching is enabled.
This parameter is enabled when auto tuning is disabled.
Setting range: 10 to 200
100
PB31 Gain switching speed loop gain
When a value smaller than 20 rad/s is set, the value
will be the same as the setting value of [Pr. PB09].
This parameter is enabled only when "Manual mode
(_ _ _ 3)" is selected in "Gain adjustment mode
selection" of [Pr. PA08].
Setting range: 0 to 65535
Because the setting unit is different from that for
MR-J2S-_A_, calculate the setting value using the
equation below and set it.
[Pr. PB31] = [Pr. PB09] × MR-J2S-_A_ [Pr. 63]/100
0 P
S
64 Speed integral compensation changing ratio
Used to set the changing ratio for speed integral
compensation when the gain switching is enabled.
This parameter is enabled when auto tuning is disabled.
Setting range: 50 to 1000
100
PB32 Gain switching speed integral compensation
When a value smaller than 0.1 ms set, the value will
be the same as the setting value of [Pr. PB10].
This parameter is enabled only when "Manual mode
(_ _ _ 3)" is selected in "Gain adjustment mode
selection" of [Pr. PA08].
Setting range: 0.0 to 5000.0
Because the setting unit is different from that for
MR-J2S-_A_, calculate the setting value using the
equation below and set it.
[Pr. PB32] = [Pr. PB10] × MR-J2S-_A_ [Pr. 64]/100
0.0 P
S
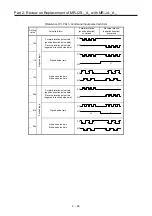
65 Gain switching selection
Select the gain switching condition.
0000h PB26 Gain switching function
Select the gain switching condition.
Refer to the comparison table below for the setting
method.
Gain switching selection comparison table
MR-J2S-_A_ MR-J4-_A_
No.65 PB26
0 0 0 0
→
0 0 0 0
0 0 0 1
0 0 0 1
0 0 0 2
0 0 0 2
0 0 0 3
0 0 0 3
0 0 0 4
0 0 0 4
0000h P
S
0
0
0
Gain switching selection
Gain will be changed under the
following conditions based on the
setting value of parameters No.61 to
No.64.
0: Disabled
1: Gain switching (CDP) is ON
2: The appointed frequency is equal
to or more than the setting value of
parameter No. 66.
3: The droop pulse is equal to or
more than the setting value of
parameter No. 66.
4: The servo motor speed is equal to
or more than the setting value of
parameter No. 66.
Summary of Contents for MELSERVO-J2-Super Series
Page 18: ...Part 1 Summary of MR J2S MR J2M Replacement 1 1 Part 1 Summary of MR J2S MR J2M Replacement ...
Page 31: ...Part 1 Summary of MR J2S MR J2M Replacement 1 14 MEMO ...
Page 109: ...Part 3 Review on Replacement of MR J2S _B_ with MR J4 _B_ 3 32 MEMO ...
Page 161: ...Part 4 Review on Replacement of MR J2S _CP_ CL_ with MR J4 _A_ RJ 4 52 MEMO ...
Page 239: ...Part 6 Review on Replacement of MR J2M with MR J4 6 20 MEMO ...
Page 240: ...Part 7 Common Reference Material 7 1 Part 7 Common Reference Material ...
Page 284: ...Part 7 Common Reference Material 7 45 Click Update Project ...
Page 342: ...Part 8 Review on Replacement of Motor 8 1 Part 8 Review on Replacement of Motor ...
Page 409: ...Part 8 Review on Replacement of Motor 8 68 MEMO ...
Page 461: ...Part 9 Review on Replacement of Optional Peripheral Equipment 9 52 MEMO ...
Page 462: ...Part 10 Startup Procedure Manual 10 1 Part 10 Startup Procedure Manual ...





































































