





























Part 7: Common Reference Material
7 - 78
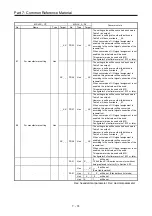
MR-J2S-_CL_ MR-J4-_A_-RJ
Conversion rule
No. Name Type
Target
No.
Type
Target
27
Encoder output pulses
Dec
-
PA15 Dec
-
(1) When the setting value of No. 58 is 1
32 times the setting value of No. 27 will be
set.
(2) When the setting value of No. 58 is other
than 1
the setting value of No. 27 will be
maintained.
To use the HC/HA series servo motors without
being replaced, refer to (5) in Section 2.3.5.
58
Function selection 9
Hex
X _ _ _
28
Internal torque limit 1
Dec
-
PA11
Dec
-
One decimal place will be added.
-
PA12
Dec
-
One decimal place will be added.
29
Internal torque limit 2
Dec
-
PC35
Dec
-
One decimal place will be added.
30 Backlash
compensation Dec - PT14
Dec -
A value obtained by multiplying the setting value
by 32 will be set.
The above value will be clamped at 65535.
To use the HC/HA series servo motors without
being replaced, refer to (5) in Section 2.3.5.
33
Electromagnetic brake
sequence output
Dec
-
PC16
Dec
-
The setting value will be maintained.
34
Load to motor inertia ratio
Dec
-
PB06
Dec
-
One decimal place will be added.
35
Position loop gain 2
Dec
-
PB08
Dec
-
One decimal place will be added.
37
Speed loop gain 2
Dec
-
PB09
Dec
-
The setting value will be maintained.
38
Speed integral compensation
Dec
-
PB10
Dec
-
One decimal place will be added.
39 Speed differential compensation
Dec
-
PB11
Dec
-
The setting value will be maintained.
40
JOG operation
acceleration/deceleration time
constant
Dec
-
PC01
Dec
-
The setting value will be maintained.
PC02
Dec
-
The setting value will be maintained.
41
Home position return
acceleration/deceleration time
constant
Dec -
PC30
Dec
-
The setting value will be maintained.
PC31
Dec
-
The setting value will be maintained.
42
Home position return position
data
Dec
-
PT08
Dec
-
The setting value will be maintained.
43
Travel distance after proximity
dog
Dec
-
PT09
Dec
-
The setting value will be maintained.
44
Stopper type home position
return stopper time
Dec
-
PT10
Dec
-
The setting value will be maintained.
45
Stopper type home position return
torque limit value
Dec
-
PT11
Dec
-
One decimal place will be added.
46
Software limit +
Dec
-
PT16
Dec
-
The setting value will be maintained.
47
Software limit +
Dec
-
PT15
Dec
-
The setting value will be maintained.
48
Software limit -
Dec
-
PT18
Dec
-
The setting value will be maintained.
49
Software limit -
Dec
-
PT17
Dec
-
The setting value will be maintained.
50 Position range output a
Dec
-
PT20
Dec
-
The setting value will be maintained.
51 Position range output a
Dec
-
PT19
Dec
-
The setting value will be maintained.
52 Position range output address -
Dec
-
PT22
Dec
-
The setting value will be maintained.
53 Position range output address -
Dec
-
PT21
Dec
-
The setting value will be maintained.
55
Function selection 6
Hex
_ X _ _ PD30
Hex
_ _ X _ The setting value will be maintained.
58
Function selection 9
Hex
_ X _ _ PC19
Hex
_ _ _ X The setting value will be maintained.
X _ _ _ PC19
Hex
_ _ X _ The setting value will be maintained.
59
Function selection A
Hex
_ X _ _ PD33
Hex
_ X _ _ The setting value will be maintained.
X _ _ _
-
-
-
The setting value will not be maintained.
(Alarm code output setting)
Hex: hexadecimal parameter; Dec: decimal parameter
Summary of Contents for MELSERVO-J2-Super Series
Page 18: ...Part 1 Summary of MR J2S MR J2M Replacement 1 1 Part 1 Summary of MR J2S MR J2M Replacement ...
Page 31: ...Part 1 Summary of MR J2S MR J2M Replacement 1 14 MEMO ...
Page 109: ...Part 3 Review on Replacement of MR J2S _B_ with MR J4 _B_ 3 32 MEMO ...
Page 161: ...Part 4 Review on Replacement of MR J2S _CP_ CL_ with MR J4 _A_ RJ 4 52 MEMO ...
Page 239: ...Part 6 Review on Replacement of MR J2M with MR J4 6 20 MEMO ...
Page 240: ...Part 7 Common Reference Material 7 1 Part 7 Common Reference Material ...
Page 284: ...Part 7 Common Reference Material 7 45 Click Update Project ...
Page 342: ...Part 8 Review on Replacement of Motor 8 1 Part 8 Review on Replacement of Motor ...
Page 409: ...Part 8 Review on Replacement of Motor 8 68 MEMO ...
Page 461: ...Part 9 Review on Replacement of Optional Peripheral Equipment 9 52 MEMO ...
Page 462: ...Part 10 Startup Procedure Manual 10 1 Part 10 Startup Procedure Manual ...







































































