





























- 258 -
8. Peripherals and Options
ON
1
PWR ERR RUN
SW1
ON
ON
J1
1 2 3
S2
J2
4
1 2 3 4
S3
CN1
CANH CANL CGND
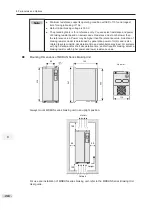
Setting of jumpers takes top view with main terminals at the bottom of the
card as visual angle. Jumpers are silk-screened on the card.
■
Extension CANopen Card (GT60CAN2)
GT60CAN2 is designed to connect the drive to high-speed CANopen bus. CANopen is an
international field bus standard. Equipments supporting this protocol can be connected to
the CANopen bus.
GT60CAN2 supports the following five protocols:
1. The Node Guard protocol, with which master can read equipment status
2. The Heartbeat protocol, with which slave detects current state to master regularly
3. The SDO that supports accelerated transmission mechanism only and transmits one
function code (two bytes)
4. Three TPDOs and three RPDOs
5. Emergency object
- 258 -
Table 8-9 Terminal descriptions of MDCAN2
Type
Terminal
Terminal Name
Function Description
CAN
communication
terminal
CANH
CAN positive input
Connect to the positive pole of the CAN
bus.
CANL
CAN negative input
Connect to the negative pole of the
CAN bus.
COM
Power ground
Connect to the reference ground of all
CAN nodes.
Table 8-10 Jumper descriptions of MDCAN2
Jumper
Description
Meaning
Setting
J2
CANopen terminal resistor
matching selection
Matching the terminal resistor
Not matching the terminal resistor
8
Note
Summary of Contents for GT600-4T132G
Page 1: ...GT600 AC Drive...
Page 5: ......
Page 86: ...5 Quick Setup 5 1 Get Familiar With Operating Panel 86 5 2 Setup Flowchart 87...
Page 87: ......
Page 100: ...5 Quick Setup 98 5...
Page 280: ...8 Peripherals and Options 278 8...
Page 306: ...12 303 11...
Page 362: ......







































































