





























Goodrive350 IP55 High-ingress Protection Series VFD
Function parameter list
-206-
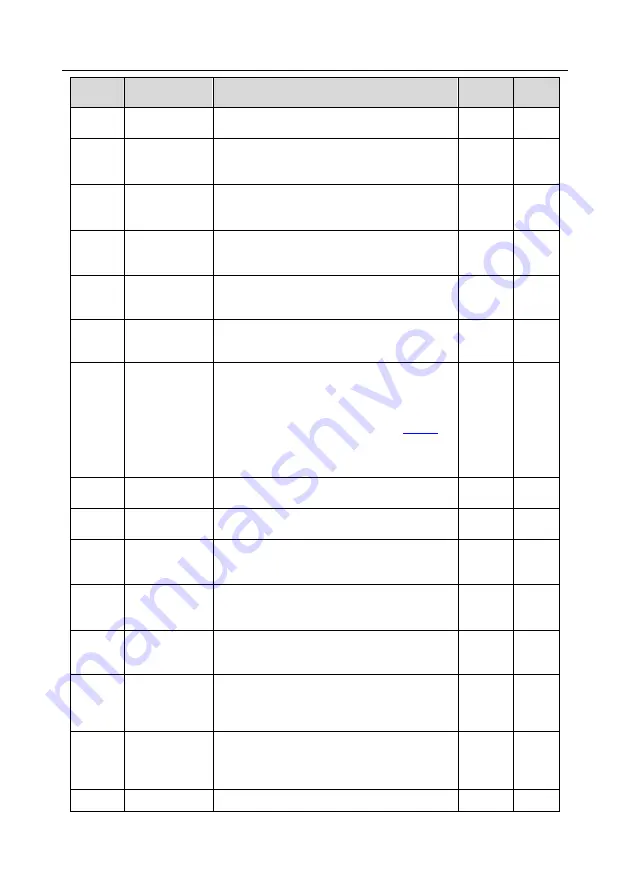
Function
code
Name
Description
Default
value
Modify
position
feedback value
after stop.
Range: 0
–30000
P18.06
Low bit of
position
feedback value
Low bit of position feedback value, zero out after
stop.
Range: 0
–65535
0
●
P18.07
Position
deviation
Deviation between current reference position
and actual running position.
Range: -32768
–32767
0
●
P18.08
Position of
position
reference point
Position of reference point of Z pulse when the
spindle stops accurately.
Range: 0
–65535
0
●
P18.09
Current position
setup of spindle
Current position setup when the spindle stops
accurately.
Range: 0
–359.99
0.00
●
P18.10
Current position
when spindle
stops accurately
Current position when spindle stops accurately.
Range: 0
–65535
0
●
P18.11
Encoder Z pulse
direction
Z pulse direction display. When the spindle
stops accurately, there may be a couple of
pulses
’ error between the position of forward
and reverse orientation, which can be eliminated
by adjusting Z pulse direction of
exchanging phase AB of encoder.
0: Forward
1: Reverse
0
●
P18.12
Encoder Z pulse
angle
Reserved.
Range: 0.00
–359.99
0.00
●
P18.13
Encoder Z pulse
error times
Reserved.
Range: 0
–65535
0
●
P18.14
High bit of
encoder pulse
count value
0
–65535
0
●
P18.15
Low bit of
encoder pulse
count value
0
–65535
0
●
P18.16
Main control
board measured
speed value
-3276.8
–3276.7Hz
0.0Hz
●
P18.17
Pulse command
frequency
Pulse command (A2, B2 terminal) is converted
to the set frequency, and it is valid under pulse
position mode and pulse speed mode.
Range: 0
–655.35Hz
0.00Hz
●
P18.18
Pulse command
feedforward
Pulse command (A2, B2 terminal) is converted
to the set frequency, and it is valid under pulse
position mode and pulse speed mode.
Range: 0
–655.35Hz
0.00Hz
●
P18.19
Position
-327.68
–327.67Hz
0.00Hz
●







































































