





























93
Part 1 Specification
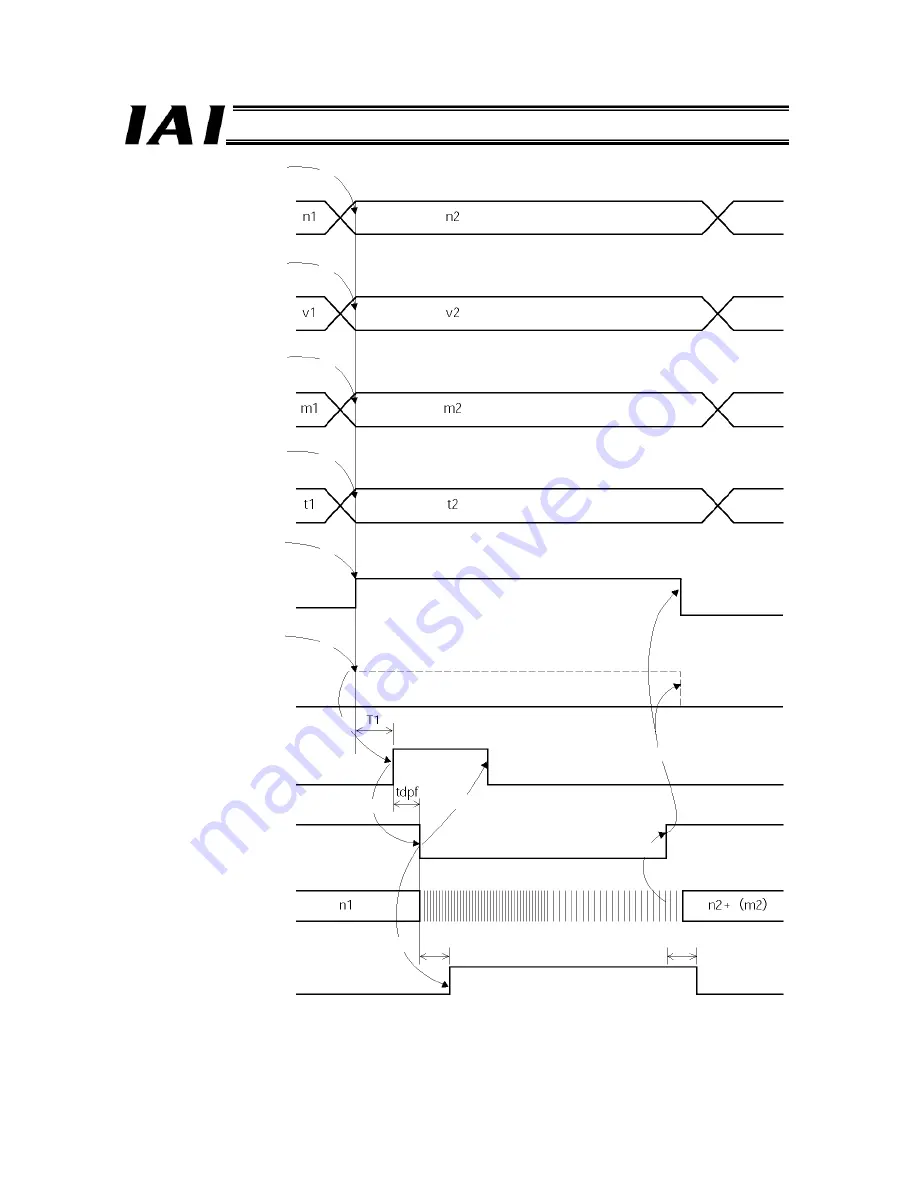
*1 Set an appropriate time so that “T1
≥
0 ms” is
satisfied, by considering the scan time of the host
controller.
*2 Yt + 2Mt + Xt
≤
tdpf
≤
Yt + 2Mt + Xt + 7 (msec)
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[9]
[10]
[11]
[13]
[12]
≤
1Mt
≤
1Mt
Target position data
setting
(PLC
Æ
GW)
Speed and
acceleration/deceleration data
setting (PLC
→
GW)
Positioning band data
setting (PLC
→
GW)
Push-current limiting
value data setting
(PLC
→
GW)
Push mode
PUSH
(PLC
→
GW)
Push direction
DIR
(PLC
→
GW)
Start command
CSTR
(PLC
→
GW)
Current position
(GW
→
PLC)
Position complete/missed
load in push operation
PEND/PSFL
(GW
Æ
PLC)
Moving
MOVE
(GW
→
PLC)
*1
*2
Summary of Contents for RoboNet
Page 1: ...Operation Manual Forth Edition ROBONET ...
Page 257: ...237 Part 2 Startup Chapter X Installed face down X Installed face up ...
Page 354: ...334 ...
Page 395: ...375 ...
Page 396: ...376 ...
Page 397: ...377 ...







































































