





























352
Part 3 Maintenance
1.3.2 Alarms, Causes and
Actions
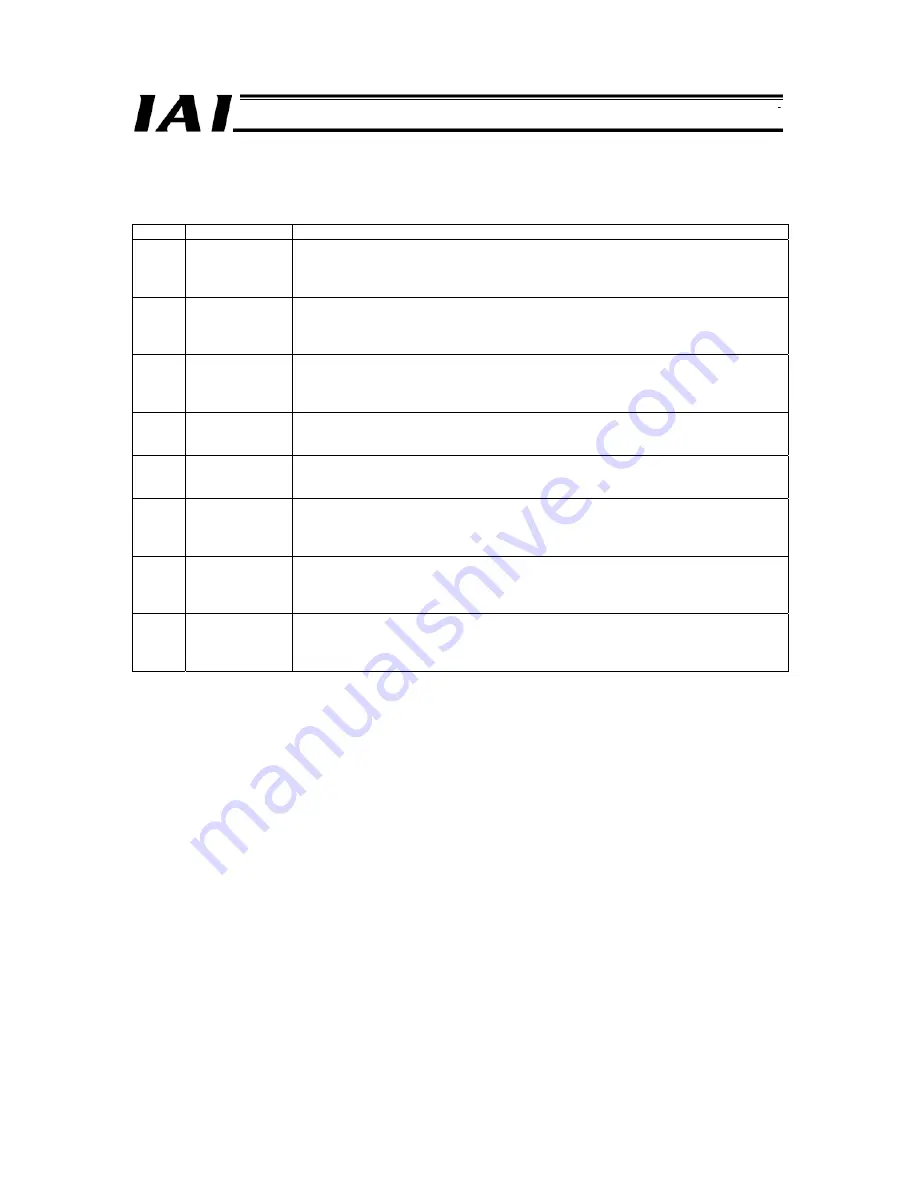
(1) Operation-cancellation alarms (These alarms can be reset with the reset signal.)
Code Alarm
name
Cause/action
080 Movement
command with
servo OFF
Cause:
A movement command was issued as a numerical command when the servo
was OFF.
Action:
Confirm that the servo is ON (SV or PEND is “1”) before issuing a movement
command.
083 Numerical
command before
home return
Cause:
A numerical command involving an absolute position was issued before home
return was completed. (Simple direct or direct numerical command mode)
Action:
Perform home return and confirm a completion signal (HEND) before issuing a
movement command.
084 Movement
command during
home return
Cause:
A movement command was issued as a numerical command while home return
was in progress.
Action:
Perform home return and confirm a completion signal (HEND) before issuing a
movement command.
085 Position
number
error during
movement
Cause:
A position number not yet registered in the position table was specified in the
positioner mode.
Action:
Check the position table again.
090 Software
reset
with servo ON
Cause:
A software reset command was received when the servo was ON.
Action:
Send a software reset command to the controller after confirming that the servo
is OFF (SV is “0”).
091 Position
number
error during
teaching
Cause:
An invalid position number was specified when writing the current position via
teaching operation.
Action:
768 position numbers from 0 to 767 can be used with the RACON and RPCON.
Use position numbers within this range.
092 PWRT
signal
detection during
movement
Cause:
The current position write signal (PWRT) was input during jogging when
teaching operation was performed in the positioner mode.
Action:
Input the PWRT signal after confirming that no jog button is pressed and that
the axis is stopped (MOVE signal is “0”).
093 PWRT
signal
detection before
home return
Cause:
The current position write signal (PWRT) was input before home return was
completed when teaching operation was performed in the positioner mode.
Action:
Input the HOME signal first to perform home return and confirm the completion
of home return (HEND signal is “1”) before inputting the PWRT signal.
Summary of Contents for RoboNet
Page 1: ...Operation Manual Forth Edition ROBONET ...
Page 257: ...237 Part 2 Startup Chapter X Installed face down X Installed face up ...
Page 354: ...334 ...
Page 395: ...375 ...
Page 396: ...376 ...
Page 397: ...377 ...







































































