





























122
Part 1 Specification
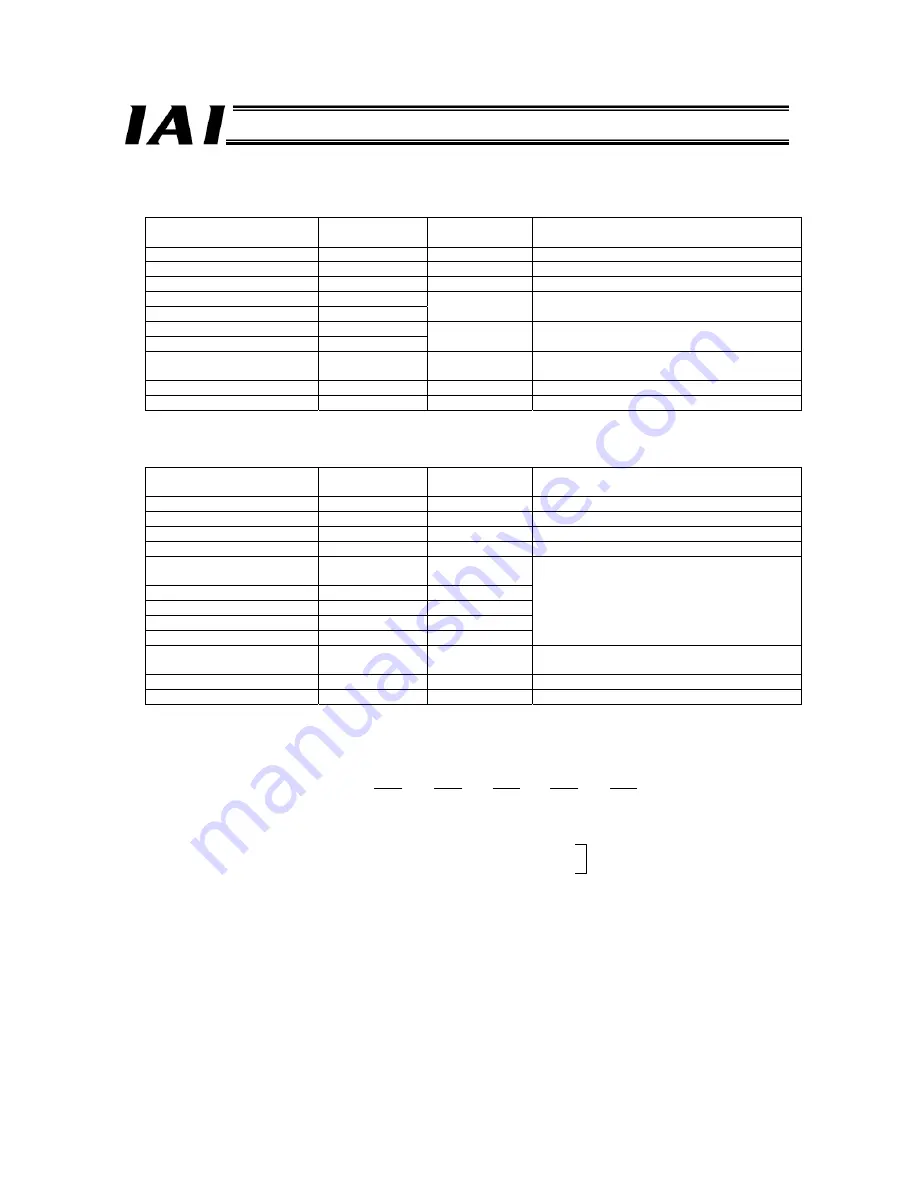
[2] Read response command data 0 to 3
z
Query
Field name
RTU mode data
(8 bits)
Data length
(bytes)
Remarks
Header None
-
Slave address
3F H
1
Fixed.
Function code
03 H
1
Starting address
(upper)
F7 H
Starting address
(lower)
02 H
2
Initial address of the response command
Number of registers (upper)
00 H
Number of registers
(lower)
05 H
2
Number of registers (1 register = 1 word): 5
Error check
(CRC)
Based on
calculation result
2 (12
A3)
Trailer None
-
Total bytes
8
z
Response
Field name
RTU mode data
(8 bits)
Data length
(bytes)
Remarks
Header None
-
Slave address
3F H
1
Fixed.
Function code
03 H
1
Data bytes
0A H
1
1-word register x 5 = 10 bytes
Data 1 (upper)
(lower)
Response
command
2
Data 2 (upper)
(lower)
Data 0
2
Data 3 (upper)
(lower)
Data 1
2
Data 4 (upper)
(lower)
Data 2
2
Position number specified in the request
command
Data 5 (upper)
(lower)
Data 3
2
Address
Error check
(CRC)
Based on
calculation result
2
Trailer None
-
Total bytes
z
Actual Example (Example of reading the response data after issuing a command to read the table position for position
No. 2 of axis 0)
Sent Query:
3F03F702000512A3
Received Response: 3F030A
1040 0002 2710 0000 0000 A74A
[1] [2] [3] [4] [5]
(Explanation) [1] The response command is “1040H,” meaning that this is a target position read command.
[2] Position number: 2
[3] Lower word of position data that has been read: 2710H
[4] Upper word of position data that has been read: 0000H
[5] Axis number: 0
2710H = 10000 (decimal)
→
100.00 mm
Summary of Contents for RoboNet
Page 1: ...Operation Manual Forth Edition ROBONET ...
Page 257: ...237 Part 2 Startup Chapter X Installed face down X Installed face up ...
Page 354: ...334 ...
Page 395: ...375 ...
Page 396: ...376 ...
Page 397: ...377 ...







































































