




























Chapter 4
[AJ
・
・
・
・
・
PID
Target
value
PID feedback (%)
092[FBV4]
Operation
command
Chapter 4
[AJ-53]
~
Code/Name
AJ-53
PID4 proportional gain
AJ-54
PID4 integral time constant
AJ-55
PID4 derivative gain
・
Sets the PID4 gain.
・
If [PIDC] terminal is active (ON), the value of the
integral constant is
operation can become instable/insecure.
Code/Name
AJ-56
PID4 output
・
Limits the output range of the PID. If [AJ
limit is disable
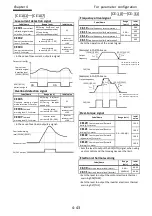
Code/Name
AJ-57
PID4 deviation
level
・
When the PID deviation pass over ±[AJ
terminal function 091[OD4] is activated.
Code/Name
AJ-58
PID4 feedback
signal turn-off level
AJ-59
PID4 feedback
signal turn-on level
・
When the PID feedback cross over the [AJ
output terminal function 092[FBV4] is
(OFF). If it crosses under the [AJ
(ON)
.
PID output (%)
PID
Target
value
PID deviation (%)
0%
Output
terminal
091[OD4]
PID feedback (%)
0%
092[FBV4]
Operation
command
Chapter 4
~
[AJ-59]
Code/Name
PID4 proportional gain
PID4 integral time constant
PID4 derivative gain
Sets the PID4 gain.
If [PIDC] terminal is active (ON), the value of the
integral constant is purged. If done while operating, the
can become instable/insecure.
Code/Name
PID4 output variable
Limits the output range of the PID. If [AJ
limit is disabled.
Code/Name
PID4 deviation over
When the PID deviation pass over ±[AJ
terminal function 091[OD4] is activated.
Code/Name
PID4 feedback compare
off level
PID4 feedback compare
on level
When the PID feedback cross over the [AJ
output terminal function 092[FBV4] is
(OFF). If it crosses under the [AJ
PID output (%)
PID deviation (%)
ON
ON
Range (unit)
0.0
~
100.0
PID4 integral time constant
0.0
~
3600.0(s)
0.0
~
100.0(s)
If [PIDC] terminal is active (ON), the value of the
purged. If done while operating, the
can become instable/insecure.
Range (unit)
0.00
~
100.00(%)
Limits the output range of the PID. If [AJ
Range (unit)
0.00
~
100.00(%)
When the PID deviation pass over ±[AJ
terminal function 091[OD4] is activated.
Range (unit)
compare
0.00
~
100.00(%)
compare
0.00
~
100.00(%)
When the PID feedback cross over the [AJ
output terminal function 092[FBV4] is
(OFF). If it crosses under the [AJ-59] level, is activated
PID output range
ON
ON
ON
Range (unit)
Initial
value
100.0
1.0
3600.0(s)
1.0
100.0(s)
0.0
If [PIDC] terminal is active (ON), the value of the
purged. If done while operating, the
can become instable/insecure.
Range (unit)
Initial value
100.00(%)
0.00
Limits the output range of the PID. If [AJ-56]=0.00 the
Range (unit)
Initial value
100.00(%)
3.00
When the PID deviation pass over ±[AJ-57], the output
terminal function 091[OD4] is activated.
Range (unit)
Initial
value
100.00(%)
100.00
100.00(%)
0.00
When the PID feedback cross over the [AJ-58] level, the
output terminal function 092[FBV4] is deactivated
59] level, is activated
Time(s)
[AJ-36]
PID output range
[AJ-36
]
Time(s)
[AJ-37]
[AJ-37]
Time(s)
[AJ-58]
[AJ-59]
4-28
Initial
value
1.0
1.0
0.0
purged. If done while operating, the
Initial value
56]=0.00 the
Initial value
57], the output
Initial
value
100.00
0.00
58] level, the
59] level, is activated
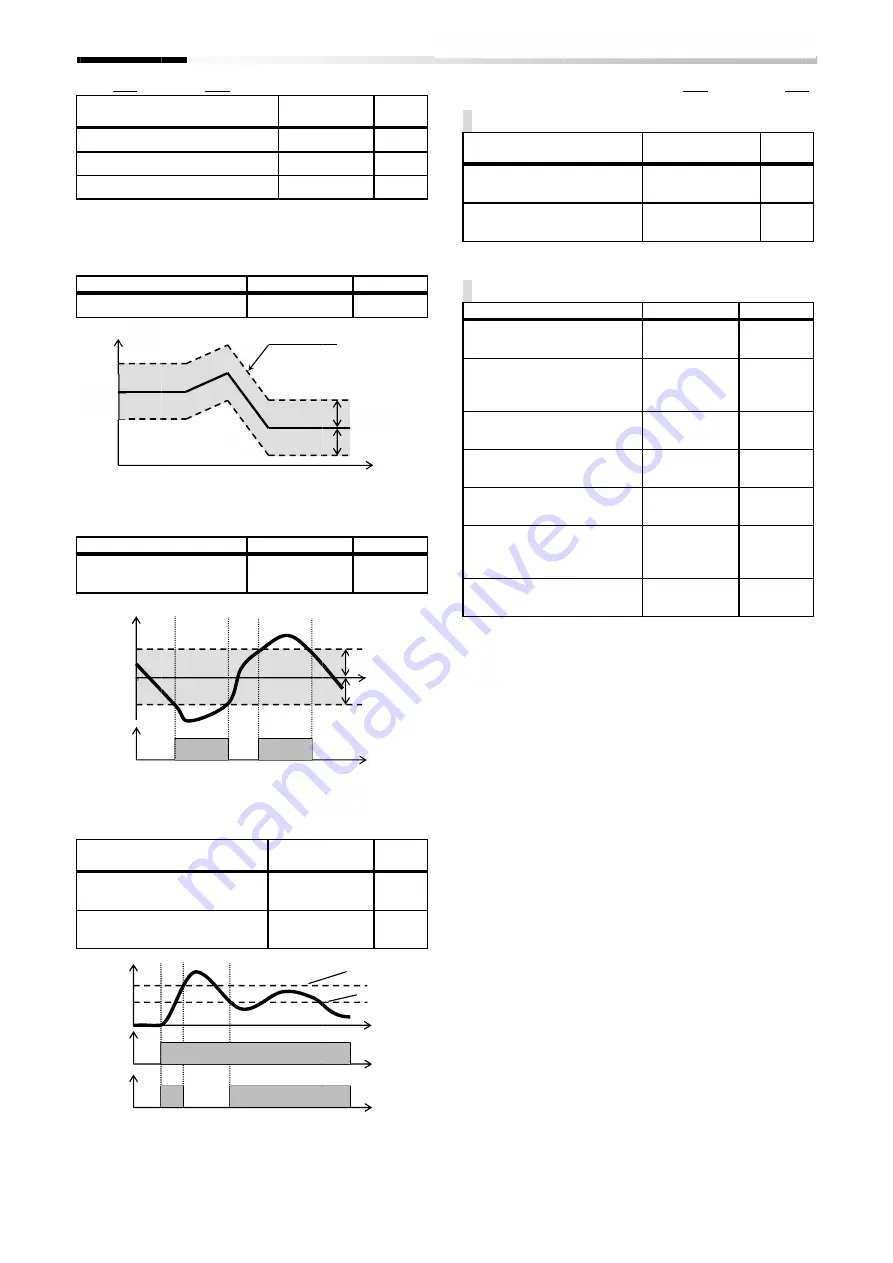
■
Parameter mode
Frequency limit
bA102
Frequency
bA103
Frequency
・
Sets u
Torque limit
bA110
Torque limit selection, 1st
bA1
parameter
1st
bA112
(Forward driving), 1st
bA113
regenerative), 1st
bA114
driving), 1st
bA115
(forward
4-quadrant mode)
bA116
selection, 1st
*1) 01(
08
・
In the case of vector control
0Hz
output torque
Time(s)
37]
For parameter configuration
Parameter mode (b
Frequency limit
Code/Name
bA102
Frequency upper limit, 1st
bA103
Frequency lower limit, 1st
Sets upper and lower limit
Torque limit
Code/Name
bA110
Torque limit selection, 1st
bA111
Torque limiting
parameter mode selection,
1st-motor
bA112
Torque limit 1
(Forward driving), 1st
bA113
Torque limit 2 (Reverse
regenerative), 1st-motor
bA114
Torque limit 3 (Reverse
driving), 1st-motor
bA115
Torque limit (4)
(forward-regenerating in
quadrant mode), 1st
bA116
Torque limit LADSTOP
selection, 1st-motor
01(Ai1 terminal)/02(
08(RS485)
In the case of vector control
0Hz) the torque limit
output torque.
For parameter configuration
[b
code)
Frequency limit
Code/Name
limit, 1st-motor
imit, 1st-motor
pper and lower limits
Code/Name
Torque limit selection, 1st-motor
Torque limiting
selection,
Torque limit 1
(Forward driving), 1st-motor
Torque limit 2 (Reverse
motor
Torque limit 3 (Reverse
Torque limit (4)
regenerating in
, 1st-motor
Torque limit LADSTOP
motor
)/02(Ai2 terminal)/03(
In the case of vector control
que limit function
.
For parameter configuration
bA102]
~
Range (unit)
0.00
~
590.00(Hz)
0.00
~
590.00(Hz)
of the frequency
Range (unit)
01
~
03/
07, 08 *1)
00(4 quadrants)/
01([TRQ] terminal
0.0
~
500.0(%)
0.0
~
500.0(%)
0.0
~
500.0(%)
0.0
~
500.0(%)
00(Disable)/
01(Enable)
)/03(Ai3 terminal)/
In the case of vector control (With sensor
function can limit the motor
For parameter configuration
~
[bA115
Range (unit)
Initial
value
590.00(Hz)
0.00
590.00(Hz)
0.00
of the frequency.
Initial value
27
terminal)
00
120.0(%)
120.0(%)
120.0(%)
120.0(%)
00
)/07(Parameter)/
(With sensor – Sensorless
can limit the motor
5]
)/
–
Summary of Contents for P1-00041HFEF
Page 6: ...0 5 Contents Contents Memo ...
Page 42: ...2 26 Chapter 2 Installation and Wiring Memo ...
Page 129: ...Index Index 3 memo ...
Page 130: ...Index Index 4 memo ...







































































