



















7-3
Chapter 7
Specifications
7.3 Common specifications
*1) Output frequency range will depend on the motor control method
and the motor used. Consult the motor manufacturer for the
maximum allowable frequency of the motor when operating beyond
60Hz.
*2) If you want to change the control mode and the motor constant is
not set appropriately, the desired starting torque cannot be obtained
and also exists the possibility of tripping.
*3) Regarding the speed range regulation of motor, the variable range
depends on the client system and the environment in which the
motor is used. Please contact us for more information.
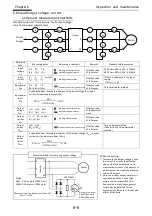
*4) If by the protective function, the IGBT error [E030] occurs, it may
have happened by the short-circuit protection, but also can occur if
the IGBT is damaged. Depending on the operation status of the
inverter, instead of the IGBT error, the overcurrent error [Er001] may
also occur.
*5) The maximum output frequency for analogue input signal Ai1/Ai2 is
adjusted to 9.8V for voltage input and 19.6mA for current input. In
order to adjust the specification use analogue start/end function.
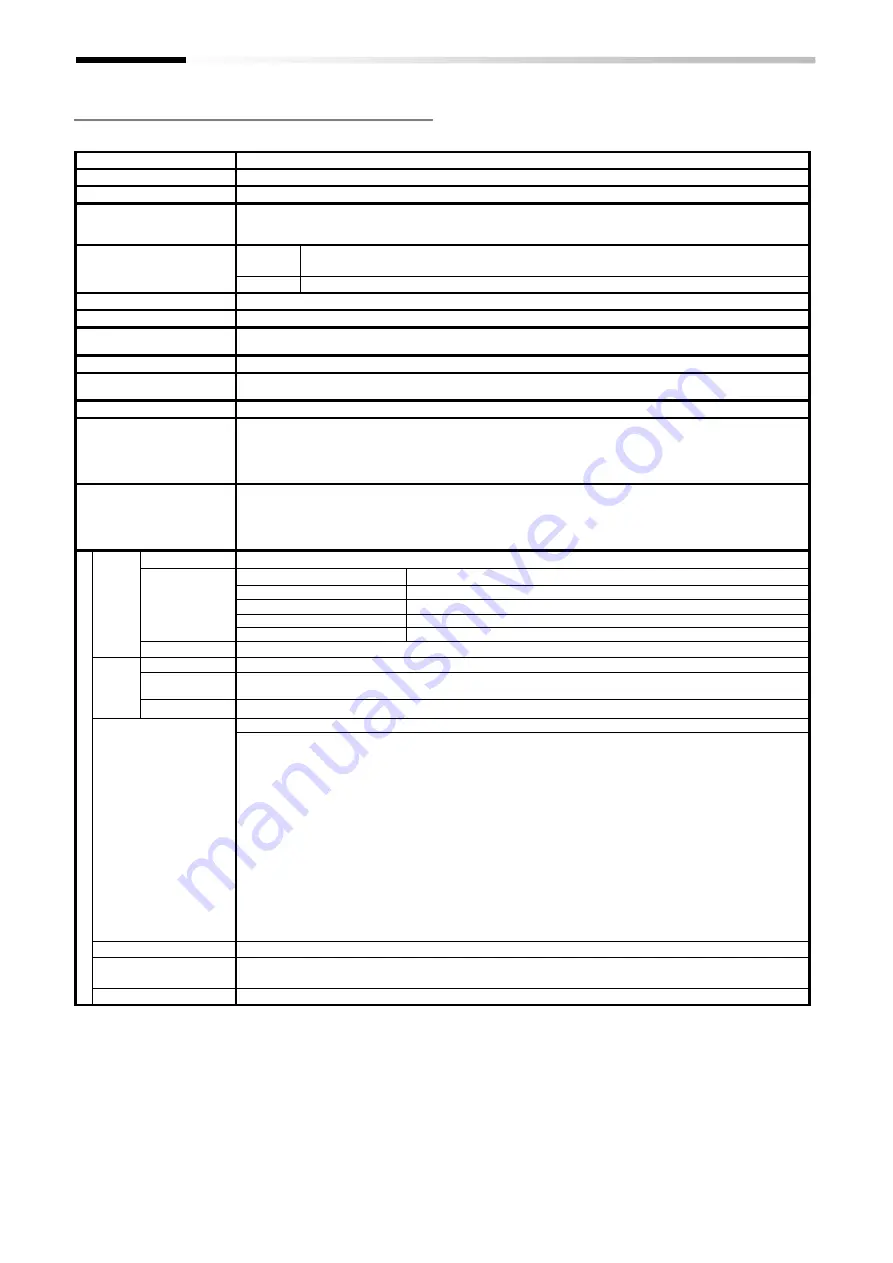
PWM system
Sine-wave PWM system
Output frequency range
*1)
0.00
~
590.00Hz
Frequency accuracy
For the highest frequency, digital±0.01%, analogue±0.2% (25±10
℃
)
Frequency resolution
Digital: 0.01Hz
Analogue: Max. frequency/4000
(Ai1 terminal/Ai2 terminal:12bit/0
~
+10V or 0
~
+20mA, Ai3 terminal 12bit/-10
~
+10V)
Control system
*2)
IM
V/f control (constant torque/reduced torque/free), automatic boost control
Cascade type sensorless vector control, 0Hz sensorless vector control
SM/PMM
synchronous startup for smart sensorless vector control
Speed fluctuation
*3)
±0.5%(sensorless vector control)
Acceleration/deceleration time
0.00
~
3600.00s (Linear, S-curve, U-curve, Inverted-U-curve, EL-S-curve)
Display
Output frequency, Output current, output torque, trip history, input/output terminal story, input/output terminal function,
input/output power, PN voltage, etc., are described in the contents of 4-11 chapter [Monitor’s description].
Start functions
DC braking after the start, matching frequency after the start, active frequency matching start, Low-voltage start, retry restart.
Stop functions
After free run stop, deceleration stop; DC braking or external DC braking operation (Braking force, time, adjustment of operation
speed)
Stall prevention function
Overload limit function, overcurrent supression, overvoltage suppresion function
Protection functions
*4)
Overcurrent error, overload error, brake resistor overload, overvoltage error, memory error, undervoltage error, current detector
error, CPU error, external trip error, USP error, ground error, supply overvoltage error, power loss error, temperature detector
error, Cooling-fan rotation speed decrease, temperature error, phase input error, IGBT error, phase output error, thermistor error,
brake error, low-speed range overload error, inverter overload, RS485communication error, RTC error, the rest is described in the
contents of 5-1 “Input terminal function list”.
Other functions
V/f free setting (7 points), upper and lower speed limit, speed jump, curve acceleration and deceleration, manual torque boost,
energy-saven operation, analogue output adjustment, minimun speed, carrier frequency adjustment, motor electronic thermal
function(free is possible), inverter thermal function, external start-end(speed and rate), frequency input selection, trip retry, restart
stop, various signal output, inilization setting, PID control, auto-decel at shut-off, brake control function, commercial switching
function, auto-tuning (on/offline), the rest is described in the contents of 4-13 “Parameters decription”.
In
p
u
t
F
re
q
u
e
n
cy
re
fe
re
n
ce
Panel
UP, DOWN keys according to the set parameter.
External signal
*5)
Ai1/Ai2 terminal (for voltage input)
0
~
10Vdc set by the voltage input (Input impedance:10kΩ)
Ai1/Ai2 terminal (for current input)
0
~
20mA set by the current input (Input impedance:100Ω)
Ai3 terminal
-10
~
+10Vdc set by the voltage input (Input impedance:10kΩ)
Multi-speed terminal
16multi-speed(With the use of the intelligent input terminal)
Pulse train-input
Maximum 32kHz×2
Communication port
RS485 serial communication (Protocol: Modbus-RTU)
R
U
N
/S
to
p
F
o
rw
a
rd
/
R
e
v
e
rs
e
Keypad
By RUN/Stop key (With the set parameter, forward/reverse can be switched)
External signal
Forward (FW)/Reverse(RV)(When input terminal functions are allocated)
3-wire input allowed(When input terminal functions are allocated)
Communication Port
Set by RS485 communication (Maximum: 115.2kbps)
Intelligent input terminals
11 terminals (A or B terminal accept a pulse train)
FW(Forward rotation)/RV(Reverse rotation), CF1
~
4(Multi-speed 1
~
4), SF1
~
7(Multi-speed bit 1
~
7), ADD(Trigger for frequency
addition), SCHG(Command change), STA(3-wire start)/STP(3-wire stop)/F_R(Forward/reverse by 3-wire), AHD(Analogue command
holding, FUP(Remote control up)/FDN(Remote control down), UDC(Remote data clearance), F-OP(Forcible operation),
SET(2nd-motor), RS(Reset), JG(Jogging), DB(External DC braking), 2CH(2-stage acc/decel), FRS(Free-run stop), EXT(External trip),
USP(Unattended start protection), CS(Commercial power supply switching), SFT(Software lock), BOK(Braking confirmation),
OLR(Overload restriction selection), KHC(Accumulated input power clear), OKHC(Accumulated input), PID(PID1 disable), PIDC(PID1
integration reset), PID2(PID2 disable), PIDC2(PID2 integration reset), SVC1
~
4(PID1 multistage target value 1
~
4), PRO(PID gain
change), PIO(PID output change), SLEP(SLEEP trigger)/WAKE(WAKE trigger), TL(Enable torque limit), TRQ1/2(Torque limit 1/2),
PPI(P/PI switching), CAS(Control gain switching), SON(Servo-ON), FOC(Forcing), ATR(Enable torque command input), TBS(Enable
torque bias), ALP(Auto-learning positioning), LAC(LAD cancellation), PCLR(Position deviation clearance), STAT(Enable 90°-shift
phase), PUP(Position bias addition), PDN(Position bias subtraction), CP1
~
4(Multistage position 1
~
4), ORL(Zero-return limit
function), ORG(Zero-return trigger function) FOT(Forward drive stop), ROT(Reverse drive stop), SPD(Speed/position change),
PSET(Position data pre-set), Mi1
~
11(General-purpose input 1
~
11), PCNT(Pulse counter), PCC(Pulse counter clearance),
ECOM(EzCOM activation), PRG(EzSQ programme start), HLD(Acc/decel stop), REN(Motion enable signal). DISP(Display lock),
PLA(Pulse train input A), PLB(Pulse train input B), DTR(Data trace start signal), etc., the rest, is described in the contents of 4-34
“Input terminal function list”.
Backup supply terminal
P+/P-: DC24V input(Input allowable voltage: 24V±10%)
Functional safety STO input
terminal
2 terminals (Simultaneous input)
Thermistor input terminal
1 terminal (PTC/NTC resistor allowed)
Summary of Contents for P1-00041HFEF
Page 6: ...0 5 Contents Contents Memo ...
Page 42: ...2 26 Chapter 2 Installation and Wiring Memo ...
Page 129: ...Index Index 3 memo ...
Page 130: ...Index Index 4 memo ...







































































