





























Chapter 9
9-9
9.2.7 Delivery
0020-0766
Delivery is a mechanism to deliver the paper transported from the fixing assembly to the delivery tray.
The following sensors detect the paper condition.
- Fixing delivery sensor (SR6005): Detect the paper delivered from the fixing unit.
- Reverse sensor (SR706): Detect the paper transported to the reverse assembly.
- Delivery sensor (SR715): Detect the paper transported to the delivery tray.
- Delivery paper full-level sensor (SR713): Detect the stack volume of paper delivered to the delivery tray.
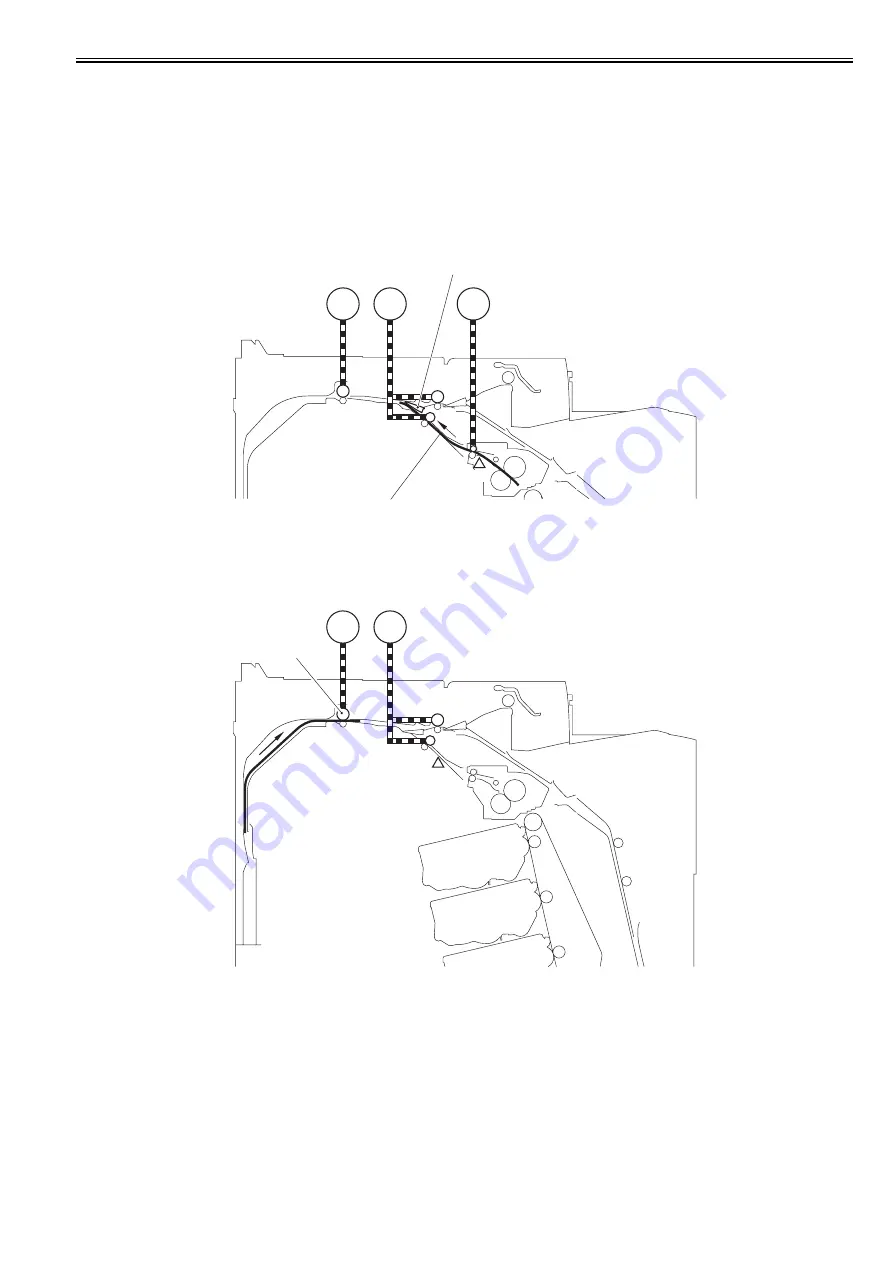
Delivery operation
1) The fixed paper is delivered from the fixing unit.
2) When a certain period of time elapses after the fixing delivery sensor (SR6005) detects the lead edge of the paper, the duplexing feed motor (M10) and the reverse
motor (M11) rotate forward.
The paper moves to the reverse assembly while pressing up the self-weight flapper.
F-9-9
3) When a certain period of time elapses after the reverse sensor (SR706) detects the lead edge of the paper, the reverse motor (M11) stops.
This certain period of time varies depending on the paper length.
The paper which passed through the reverse roller before the reverse motor stopped is temporarily stored at the back of the machine.
4) The reverse motor rotates in reverse.
When the reverse motor rotates in reverse, the paper is transported to the opposite direction.
F-9-10
SR6005
M10
M11
M1
Self-weight flapper
Paper
M11
M10
SR706
Reverse roller
Summary of Contents for iR C1020 Series
Page 1: ...Sep 8 2008 Service Manual iR C1020 Series iR C1021i ...
Page 2: ......
Page 6: ......
Page 18: ...Contents ...
Page 19: ...Chapter 1 Introduction ...
Page 20: ......
Page 22: ......
Page 57: ...Chapter 2 Installation ...
Page 58: ......
Page 60: ......
Page 73: ...Chapter 3 Basic Operation ...
Page 74: ......
Page 76: ......
Page 81: ...Chapter 4 Main Controller ...
Page 82: ......
Page 84: ......
Page 97: ...Chapter 5 Original Exposure System ...
Page 98: ......
Page 100: ......
Page 112: ......
Page 113: ...Chapter 6 Original Feeding System ...
Page 114: ......
Page 116: ......
Page 132: ......
Page 133: ...Chapter 7 Laser Exposure ...
Page 134: ......
Page 136: ......
Page 143: ...Chapter 8 Image Formation ...
Page 144: ......
Page 146: ......
Page 180: ......
Page 181: ...Chapter 9 Pickup and Feed System ...
Page 182: ......
Page 213: ...Chapter 9 9 29 F 9 79 1 2 3 ...
Page 214: ......
Page 215: ...Chapter 10 Fixing System ...
Page 216: ......
Page 218: ......
Page 233: ...Chapter 11 External and Controls ...
Page 234: ......
Page 263: ...Chapter 12 e maintenance imageWARE Remote ...
Page 264: ......
Page 266: ......
Page 275: ...Chapter 12 12 9 F 12 27 ...
Page 280: ......
Page 281: ...Chapter 13 Maintenance and Inspection ...
Page 282: ......
Page 284: ......
Page 286: ......
Page 287: ...Chapter 14 Measurement and Adjustments ...
Page 288: ......
Page 290: ......
Page 293: ...Chapter 15 Correcting Faulty Images ...
Page 294: ......
Page 296: ......
Page 317: ...Chapter 16 Error Code ...
Page 318: ......
Page 320: ......
Page 331: ...Chapter 16 16 11 ...
Page 332: ......
Page 333: ...Chapter 17 Special Management Mode ...
Page 334: ......
Page 336: ......
Page 343: ...Chapter 17 17 7 ...
Page 344: ......
Page 345: ...Chapter 18 Service Mode ...
Page 346: ......
Page 348: ......
Page 388: ......
Page 389: ...Chapter 19 Upgrading ...
Page 390: ......
Page 392: ......
Page 396: ...Chapter 19 19 4 3 Click Next F 19 4 4 Select a USB connected device and click Next F 19 5 ...
Page 397: ...Chapter 19 19 5 5 Click Start F 19 6 6 Click Yes F 19 7 Download will be started F 19 8 ...
Page 399: ...Chapter 19 19 7 ...
Page 400: ......
Page 401: ...Chapter 20 Service Tools ...
Page 402: ......
Page 404: ......
Page 407: ...Sep 8 2008 ...
Page 408: ......







































































