





























Chapter 4
Geometries with orientation support
138
Rockwell Automation Publication MOTION-UM002F-EN-P - February 2018
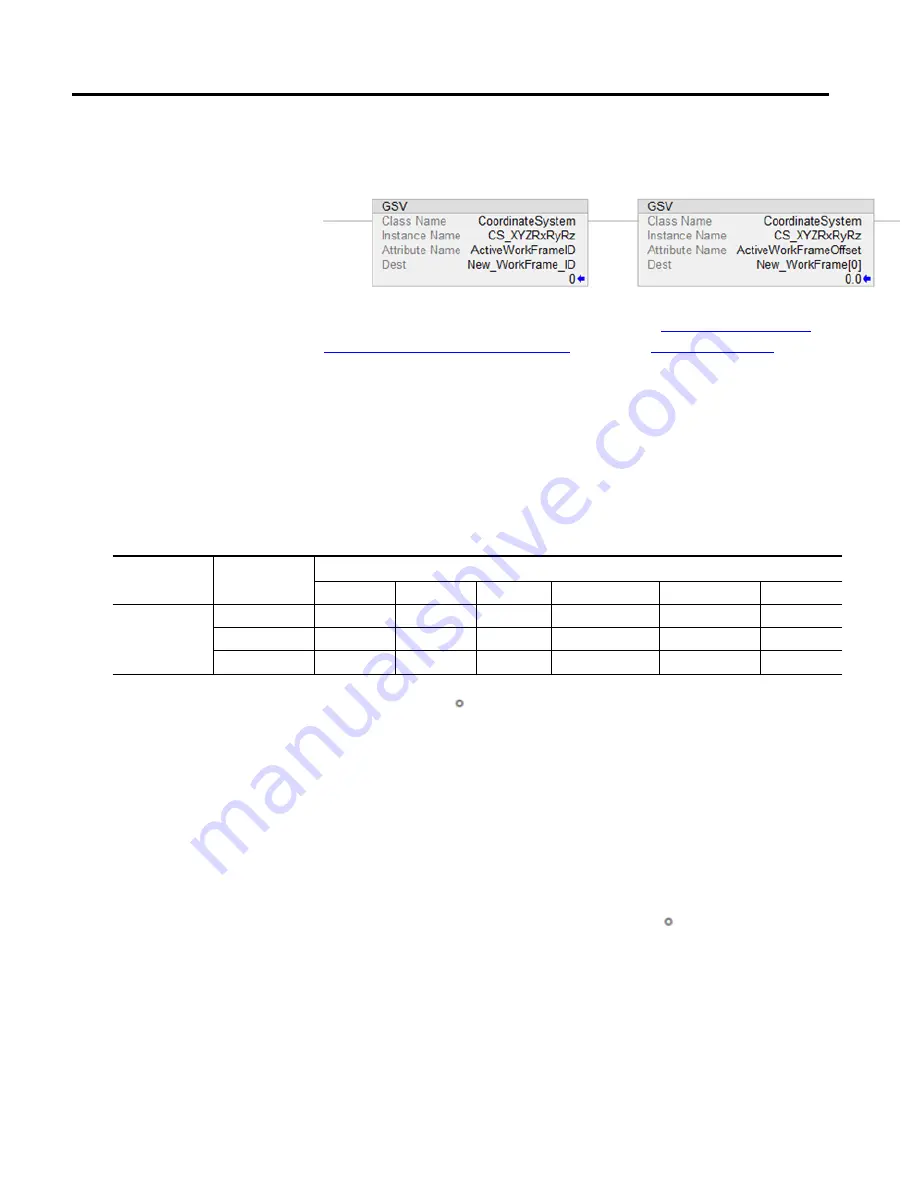
•
These two attributes of the coordinate system are available via GSV
instructions as shown in the image below.
For more information about Motion Instructions, see
Motion Instructions Reference Manual
, publication
Restrictions
In some robot geometries, for example Delta robots, due to mechanical constrains
some of the work frame orientation offsets are restricted so that the robot cannot
be programmed for unreachable positions through the work frame offsets.
The following table shows the current restrictions on the work frame offsets for
different robot geometries supported by Logix Designer application.
Geometry Type
Coordinate
Definition
Work Frame Offsets
X
Y
Z
Rx
Ry
RZ
Delta
J1J2J6
Allowed
Allowed
Allowed
Not Allowed
Not Allowed
Allowed
J1J2J3J6
Allowed
Allowed
Allowed
Not Allowed
Not Allowed
Allowed
J1J2J3J4J5
Allowed
Allowed
Allowed
Not Allowed
Not Allowed
Allowed
Tip:
Offset values must be set to 0 for restricted orientation offset inputs. MCTO/MCTPO instructions generate error #148 for
invalid orientation offsets.
Establish a work frame
Following illustration shows an example of establishing a new work frame
(X’Y’Z’) from the base frame (XYZ) and change in target position P with
reference to a new work frame.
Work frame X’Y’Z’ is located at 100 units on X axis, 50 units on y axis and rotated
30 degree on Z axis of the robot’s base frame XYZ. Work frame offset values are
set as (X = 100, Y = 50, Z = 0, Rx = 0, Ry = 0, Rz = 30 ).