





























Chapter 3
Geometries with no orientation support
112
Rockwell Automation Publication MOTION-UM002F-EN-P - February 2018
The H-bot is a special type of Cartesian two-axis gantry robot. This type of
machine has three rails positioned in the form of a letter H. Two motors are
positioned at the end of each leg of the robot. Unlike a standard gantry robot,
neither motor is riding on top of the moving rails. Use these guidelines when
configuring a Cartesian H-bot.
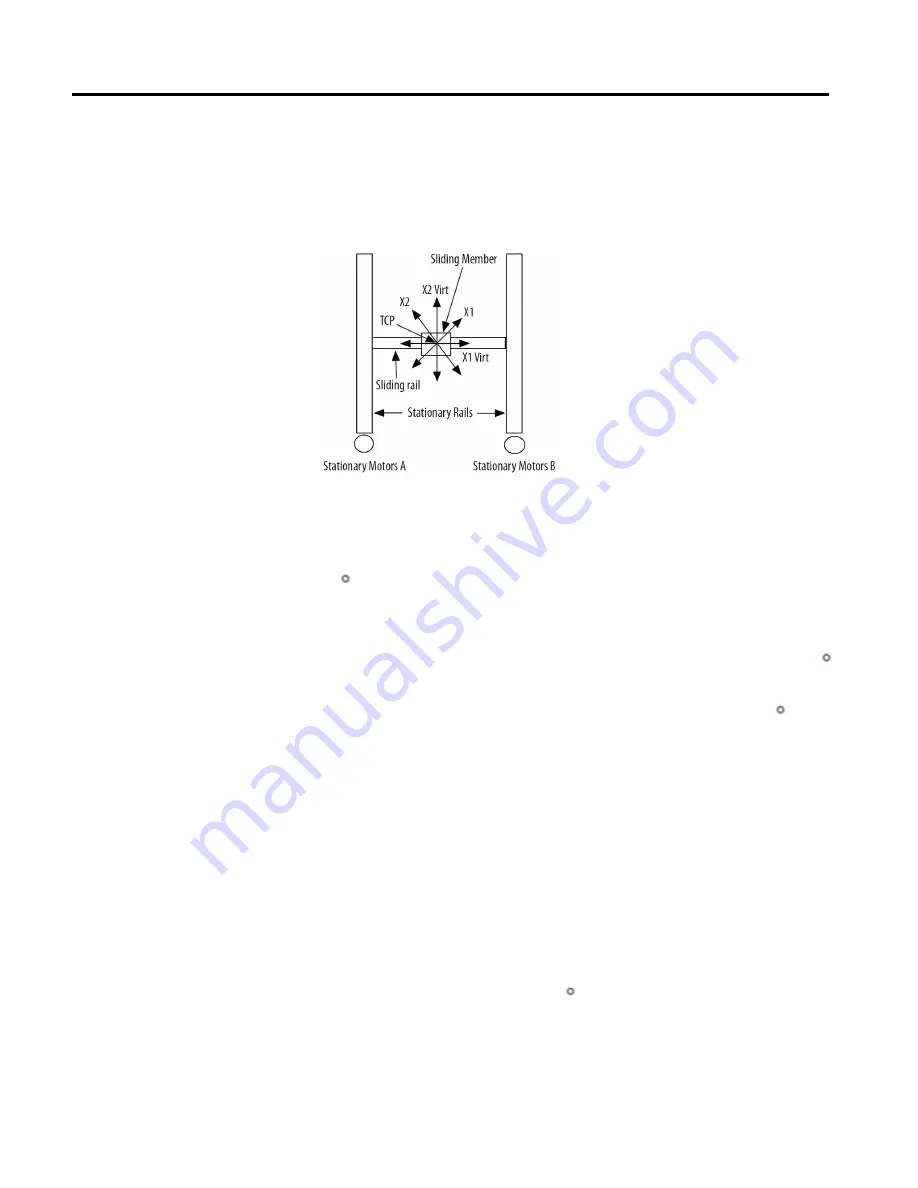
In the Cartesian H-bot illustration, the X1 and X2 axes are the real axes on the
robot. X1 Virt and X2 Virt are configured as the virtual axes.
The configuration of the H-bot mechanical linkages enable it to move at a
45
angle to the axes when motor A or motor B is rotated.
For example, when:
•
Motor A (X1 axis) is rotated, the robot moves along a straight line at + 45
angle.
•
Motor B (X2 axis) is rotated, the machine moves at an angle of -45 .
•
Motors A and B are rotated clockwise at the same speed, then the machine
moves along a horizontal line.
•
Motors A and B are rotated counterclockwise at the same speed then, the
machine moves along a vertical line.
Any X,Y position can be reached by properly programming the two motors.
For example, a move of (X1 = 10, X2 = 0) causes the X1X2 axes to move to a
position of (X1=7.0711, X2=7.0711). A move to (X1=10, X2 =10) causes the
robot to move to a position of (X1=0, X2=14.142).
Utilizing the Logix Designer application Kinematics function configured with two
Cartesian coordinate systems and a -45 rotation performs the function.
To configure two Cartesian coordinate systems:
Coordinate System 1 (CS1) and Coordinate System 2 (CS2) each contain two
linear axes.
Configure a Cartesian H-bot
robot